Supported Transformation
Overview
Transformation type | Schema | Required TwinCAT function (level) |
|---|---|---|
| TF5110 TwinCAT 3 Kinematic Transformation (Level 1) |
2D kinematic transformations
Transformation type | Schema | Required TwinCAT function (level) |
|---|---|---|
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) |

3D kinematic transformations
Transformation type | Schema | Required TwinCAT function (level) |
|---|---|---|
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |

4D kinematic transformations
Transformation type | Schema | Required TwinCAT function (level) |
|---|---|---|
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |
5D and 6D kinematic transformations (export limited)
 | TF5113 | TwinCAT Kinematic Transformation L4 TF5113 | TwinCAT 3 Kinematic Transformation L4 is subject to legal restrictions and is not included in the TF5400.AdvancedMotionPack workload or included in the TF5400 TwinCAT Advanced Motion Pack Setup from the website. If required, please get in touch with your sales contact. |
Transformation type | Schema | Required TwinCAT function (level) |
|---|---|---|
| TF5113 TwinCAT 3 Kinematic Transformation (Level 4) | |
| TF5113 TwinCAT 3 Kinematic Transformation (Level 4) | |
| TF5113 TwinCAT 3 Kinematic Transformation (Level 4) | |
| TF5113 TwinCAT 3 Kinematic Transformation (Level 4) |
Additional objects
The following objects can be created and selected in the corresponding kinematics. A drop-down parameter list in the kinematics is used for the selection. Select the corresponding object ID (OTCID).
Object type | Description | Required level and version |
|---|---|---|
Tool offset - describes a tool at the level of the kinematics flange. | TF5110 TwinCAT 3 Kinematic Transformation (Level 1) | |
Linear tool - describes a 1D tool mounted on the kinematics flange, which offers the option to move the TCP towards the tool. | TF5110 TwinCAT 3 Kinematic Transformation (Level 1) | |
Drive torque - represents the inertia and the efficiency of the motor and drive, to enable more precise calculation of the dynamic model. | TF5110 TwinCAT 3 Kinematic Transformation (Level 1) | |
Coordinate system - describes a user-defined coordinate system. | TF5110 TwinCAT 3 Kinematic Transformation (Level 1) |
- General Parameters for the Kinematics
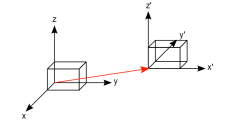
- Static Transformation
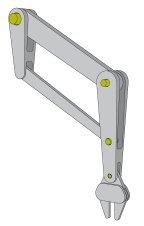
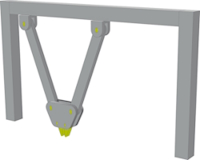
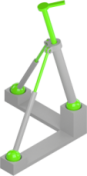
- 2D-Kinematics Type 1 (P_2C)
- 2D-Kinematics Type 2 (P_2C2)
- 2D-Kinematics Type 3 (S_CC)
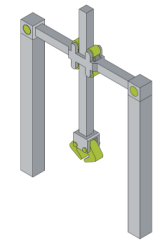
- 2D-Kinematics H-Bot (P_2Y)
- 2D-Kinematics Type 5 (S_CC)
- 2D-Kinematics Type 6 (P_2X)
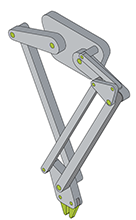
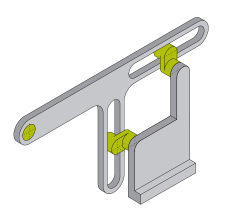
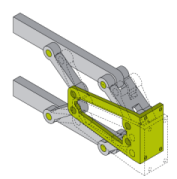
- 2D-Scissor Kinematics Type 1 (P_2X)
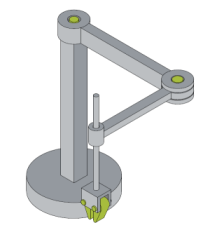
- 3D-Kinematics Type 8 (S_CCC)
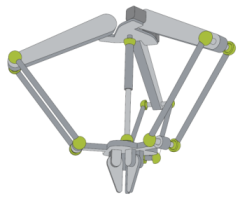
- 3D-Delta Type 1 (P_3C)
- 3D-Delta Type 2 (P_3C2)
- 3D-Delta T Type 3 (P_3C3)
- 3D-Delta Y Type 4 (P_3C4)
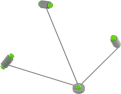
- 3D-Tripod Type 1 (P_3Z)
- 3D-Tripod Type 2 (P_3L)
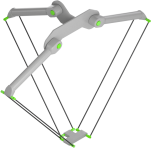
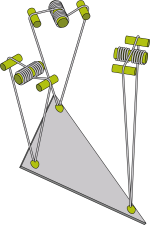
- 3D-Cable Kinematics Type 1 (P_3Z)
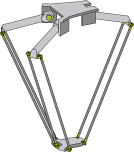
- 3D-Cable Kinematics Type 2 (P_3L)
- 3D-Kinematics Type 7 (PXX SZ)
- 4D-SCARA (S_CCZC)
- 4D-Kinematics Type 6 (S_XCZC)
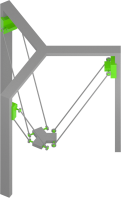
- 4D-Cable-Kinematics (P_4L)
- 5D-Kinematics Type 2 (XYZab)
- 5D-Kinematics Type 3 (XYZAB)
- 6D-Stewart Platform (P_6L)
- Six Axis Articulated (S_CBBCBC)
- Drive Torque
- Tool Offset
- Tool Linear
- Coordinate system (Coordinate Frame)