6D-Stewart Platform (P_6L)
For the kinematic transformation 6D-Stewart Platform (P_6L), a moving platform is supported by six cylinders. The Stewart Platform is a parallel kinematics with six degrees of freedom.
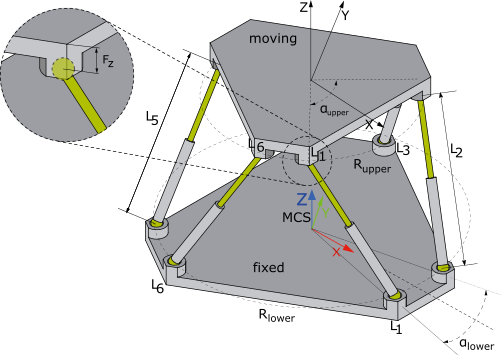
The X axis of the machine coordinate system (MCS) points toward the point that is in the center between joints 1 and 2. The zero point in the Z direction is usually slightly above the lower (base) platform and in the plane that is spanned by the joint centers of the anchor points.
All joints on a platform are on a circular path and thus have the same distance to the center of the platform. This distance must be specified with Rlower (lower platform) and Rupper (upper platform).
The angle between joints 1 and 2, which is equally between joints 3 and 4 and between joints 5 and 6, is specified with as αlower (lower platform) and αupper (upper platform).
The ACS axis positions always refer to the entire cylinder length L. Startup with an ACS axis position equal to 0 is therefore not possible.
Kinematics parameters
The following parameters are available for Stewart kinematics:
Parameter | Description | Type | Unit |
|---|---|---|---|
Flange translation Z | Moves the upper level to the surface of the upper platform so that the thickness of the platform is taken into account. |
| mm |
Tool offset OID | Set the tool elongation. |
|
|
Lower radius Rlower | Radius of the lower platform. Describes the distance from the origin in the center of the lower platform to the arm joints of the lower platform. |
| mm |
Upper radius Rupper | Radius of the upper platform. Describes the distance from the origin in the center of the upper platform to the arm joints of the upper platform. |
| mm |
Lower angle αlower | The angle αlower describes the angle between the anchor points of L1 and L2, L3 and L4, L5 and L6 on the lower platform. |
| ° |
Upper angle αupper | The angle αupper describes the angle between the anchor points of L1 and L2, L3 and L4, L5 and L6 on the upper platform. |
| ° |
General Parameters for the Kinematics
General parameters that apply to any kinematics are described in the following sections:
For all kinematics with tool also applies:
Requirements
Development Environment | Target System | TwinCAT Function |
|---|---|---|
TwinCAT V3.1.4024.11 TF5400 TwinCAT 3 Advanced Motion Pack V3.1.6.67 | PC or CX (x86 or x64) | TF5113 TwinCAT 3 Kinematic Transformation (Level 4) |
 | TF5113 | TwinCAT Kinematic Transformation L4 TF5113 | TwinCAT 3 Kinematic Transformation L4 is subject to legal restrictions and is not included in the TF5400.AdvancedMotionPack workload or included in the TF5400 TwinCAT Advanced Motion Pack Setup from the website. If required, please get in touch with your sales contact. |