3D-Delta T Type 3 (P_3C3)
|
|
|
|
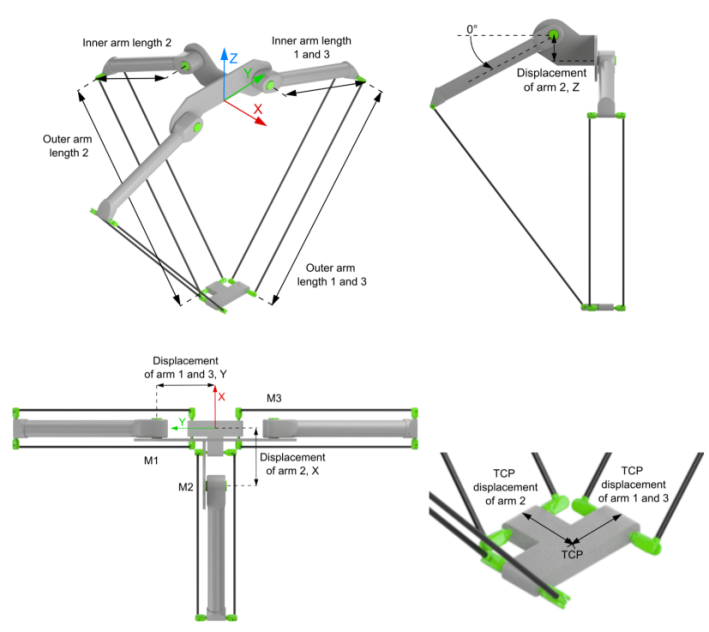
The 3D-Delta T Type 3 (P_3C3) is structured as shown above. Two arms are directly opposite each other, while the third arm is at an angle of 90 degrees to them. This arm configuration allows two robots of this type to be placed very close together.
The machine coordinate system (MCS) is located centrally between the two opposite arms at the height of motors M1 and M3.
All motor axes are scaled in degrees and 0° is defined, as shown in the schematic, with the arrow indicating the positive direction of rotation. This applies to all three motors.
Kinematics parameters
Parameter | Description | Type | Unit |
|---|---|---|---|
Inner arm length 1 and 3 | Arm 1, Arm 3: Length from center of rotation to center of rotation of the inner arm (connected directly to the motor) |
| mm |
Inner arm length 2 | Arm 2: Length from center of rotation to center of rotation of the inner arm (connected directly to the motor) |
| mm |
Outer arm length 1 and 3 | Arm 1, Arm 3: Length between pivots of the outer arm |
| mm |
Outer arm length 2 | Arm 2: Length between pivots of the outer arm |
| mm |
Displacement of arm 1 and 3, Y | Arm 1, Arm 3: The distance between the MCS origin and each motor axis |
| mm |
Displacement of arm 2, X | Arm 2: The distance between the MCS origin and the motor axis |
| mm |
Displacement of arm 2, Z | Arm 2: The distance between the MCS origin and the motor axis |
| mm |
TCP displacement of arm 1 and 3 | Arm 1, Arm 3: Length between the center of the gripper plate and the virtual rotation axes of the outer arm |
| mm |
TCP displacement of arm 2 | Arm 2: Length between the center of the gripper plate and the virtual rotation axis of the outer arm |
| mm |
General Parameters for the Kinematics
General parameters that apply to any kinematics are described in the following sections:
For all kinematics with tool also applies:
Requirements
Development Environment Installation Package | Target System | TwinCAT Function |
|---|---|---|
TwinCAT V3.1.4024.7 TF5400 TwinCAT 3 Advanced Motion Pack V3.1.10.30 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |