2D-Kinematics Type 5 (S_CC)
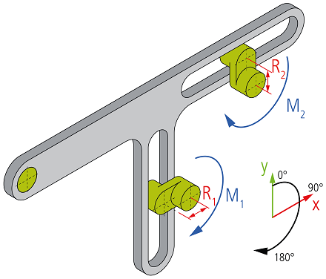
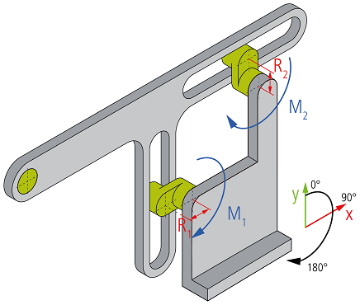
A crank consists of a wheel with an eccentrically located pin. Two cranks whose ends lead to bearings facilitate two dimensional movements of the TCP. The cranks are moved by motors that are obstructed in a stationary machine.
Parameters for the Kinematics
Parameter | Description | Type | Unit |
|---|---|---|---|
Radius R1 |
|
| mm |
Radius R2 |
|
| mm |
General Parameters for the Kinematics
General parameters that apply to any kinematics are described in the following sections:
For all kinematics with tool also applies:
Requirements
Development Environment | Target System | TwinCAT Function |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5111 TwinCAT 3 Kinematic Transformation (Level 2) |