4D-Kinematics Type 6 (S_XCZC)
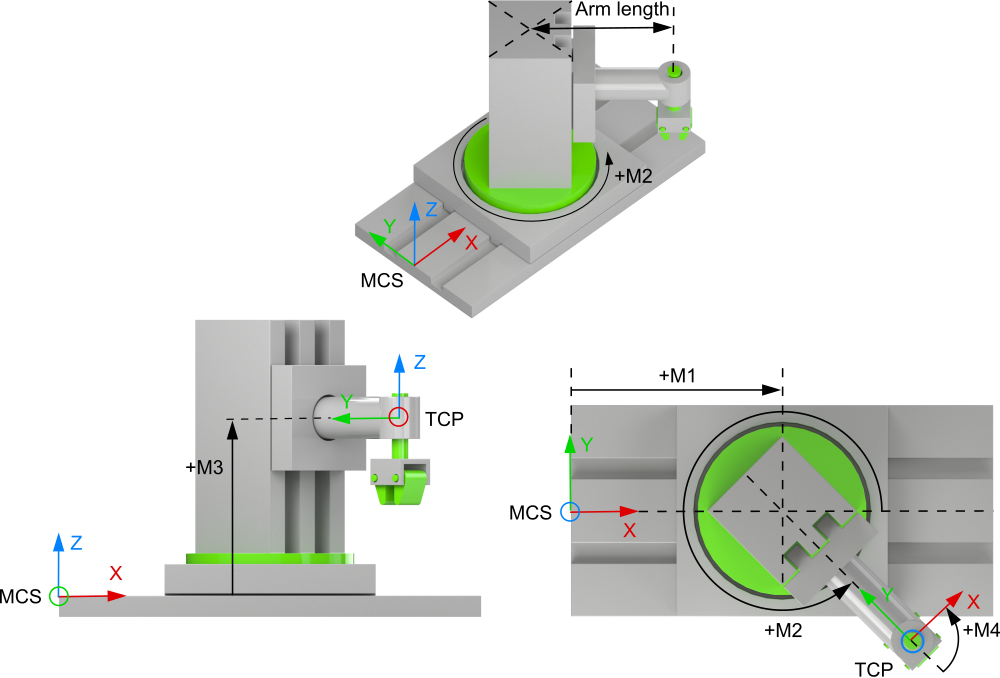
The 4D-Kinematics Type 6 (S_XCZC) describes a serial kinematic transformation that is structured as shown in schematic above.
The motor axes M2 and M4 are scaled in degrees, the positive direction of rotation being in the direction of the arrow.
The motor axes M1 and M3 are scaled in millimeters. In relation to the MCS, M1 specifies a movement on the X-axis and M3 a movement on the Z-axis. The origin of the MCS coordinate system is located on the linear axis M1 in joint M2.
 | Moving to singular positions Singular positions, as with this robot type, e.g. M2 = +-90°, cannot be moved to in cartesian mode. It is only possible to drive to these positions in axis mode (Direct Mode). |
Kinematics parameters
Parameter | Description | Type | Unit |
|---|---|---|---|
Arm length | Distance between rotary axis M2 and rotary axis M4 |
| mm |
General Parameters for the Kinematics
General parameters that apply to any kinematics are described in the following sections:
For all kinematics with tool also applies:
Requirements
Development Environment Installation Package | Target System | TwinCAT Function |
|---|---|---|
TwinCAT V3.1.4024.7 TF5400 TwinCAT 3 Advanced Motion Pack V3.1.10.30 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |