2D-Kinematics H-Bot (P_2Y)
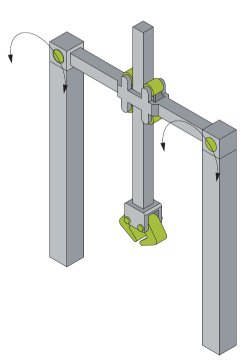
The 2D-Kinematics H-Bot (P_2Y) is configured as shown in the diagram above.
The motor axes have to be scaled in millimeters. All the other position parameters result from the kinematic constraints.
The point of origin of the machine coordinate system MCS is defined by the point for that the positions of the two motors are zero.
Parameters for the Dynamic Model
Parameter | Description | Type |
|---|---|---|
FirstDriveTorqueOID | Object ID of the first drive torque (see Drive Torque). |
|
SecondDriveTorqueOID | Object ID of the second drive torque |
|
General Parameters for the Kinematics
General parameters that apply to any kinematics are described in the following sections:
For all kinematics with tool also applies:
Requirements
Development Environment | Target System | TwinCAT Function |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5111 TwinCAT 3 Kinematic Transformation (Level 2) |