3D-Tripod Type 1 (P_3Z)
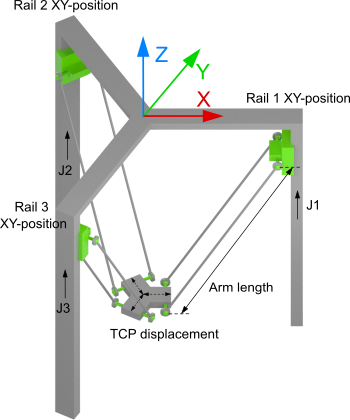
The 3D-Tripod Type 1 (P_3Z) is structured as shown in the figure above.
All linear axes (ACS) are scaled in mm.
Kinematics parameters
Parameter | Description | Type | Unit |
|---|---|---|---|
Arm length | Arm length from pivot point to pivot point |
| mm |
Rail 1 X-position | X-position of the 1st rail in relation to the MCS |
| mm |
Rail 1 Y-position | Y-position of the 1st rail in relation to the MCS |
| mm |
Rail 2 X-position | X-position of the 2nd rail in relation to the MCS |
| mm |
Rail 2 Y-position | Y-position of the 2nd rail in relation to the MCS |
| mm |
Rail 3 X-position | X-position of the 3rd rail in relation to the MCS |
| mm |
Rail 3 Y-position | Y-position of the 3rd rail in relation to the MCS |
| mm |
TCP displacement | Length between the center of the gripper plate and the virtual rotation axis of the arm |
| mm |
General Parameters for the Kinematics
General parameters that apply to any kinematics are described in the following sections:
For all kinematics with tool also applies:
Requirements
Development environment | Target platform | TwinCAT function |
|---|---|---|
TwinCAT V3.1.4024.24 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |