3D-Tripod Type 2 (P_3L)
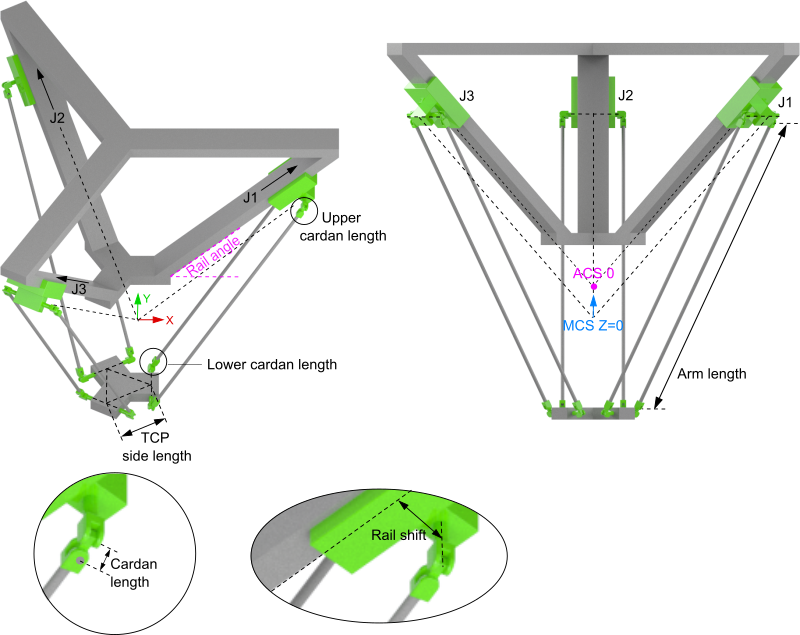
The 3D-Tripod Type 2 (P_3L) is structured as shown in the figure above.
All linear axes (ACS) are scaled in millimeters (mm). The 0-position of the axes is only a "virtual" point, which cannot be approached. A positive velocity of the motors moves the tool upwards so that the linear axes cannot reach a negative position.
Kinematics parameters
Parameter | Description | Type | Unit |
|---|---|---|---|
Arm length | Arm length from pivot point to pivot point |
| mm |
Rail angle | Angle in which the guide rails of the linear motors are mounted. |
| ° |
Rail shift | Shift of the arm suspension points to the guide rails of the linear motors. |
| mm |
Upper cardan length | If a cardan joint is used at the upper arm suspension points, this parameter can be used to specify the shift of the two joints within the cardan joint. When using a ball joint, enter length 0. |
| mm |
Lower cardan length | If a cardan joint is used at the lower arm suspension points, this parameter can be used to specify the shift of the two joints within the cardan joint. When using a ball joint, enter length 0. |
| mm |
TCP side length | Side length of the virtual triangle in the TCP. |
| mm |
General Parameters for the Kinematics
General parameters that apply to any kinematics are described in the following sections:
For all kinematics with tool also applies:
Requirements
Development environment | Target platform | TwinCAT function |
|---|---|---|
TwinCAT V3.1.4024.24 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |