Unterstützte Transformationen
Übersicht
Transformationstyp | Schema | Erforderliche TwinCAT Funktion (Level) |
|---|---|---|
| TF5110 TwinCAT 3 Kinematic Transformation (Level 1) |
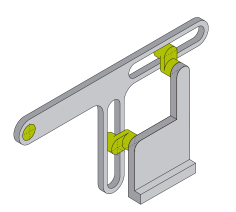
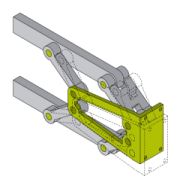
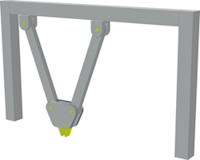
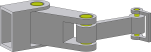
2D kinematische Transformationen
Transformationstyp | Schema | Erforderliche TwinCAT Funktion (Level) |
|---|---|---|
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) | |
| TF5111 TwinCAT 3 Kinematic Transformation (Level 2) |

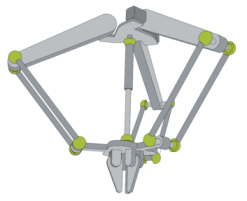
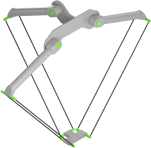
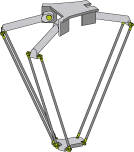
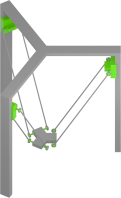
3D kinematische Transformationen
Transformationstyp | Schema | Erforderliche TwinCAT Funktion (Level) |
|---|---|---|
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |

4D kinematische Transformationen
Transformationstyp | Schema | Erforderliche TwinCAT Funktion (Level) |
|---|---|---|
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) | |
| TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |
5D und 6D kinematische Transformationen (Export beschränkt)
 | TF5113 | TwinCAT Kinematic Transformation L4 TF5113 | TwinCAT 3 Kinematic Transformation L4 unterliegt rechtlichen Beschränkungen und ist nicht im Workload TF5400.AdvancedMotionPack bzw. im TF5400 TwinCAT Advanced Motion Pack Setup von der Webseite enthalten. Bei Bedarf wenden Sie sich bitte an Ihren Vertriebskontakt. |
Transformationstyp | Schema | Erforderliche TwinCAT Funktion (Level) |
|---|---|---|
| TF5113 TwinCAT 3 Kinematic Transformation (Level 4) | |
| TF5113 TwinCAT 3 Kinematic Transformation (Level 4) | |
| TF5113 TwinCAT 3 Kinematic Transformation (Level 4) | |
| TF5113 TwinCAT 3 Kinematic Transformation (Level 4) |
Zusätzliche Objekte
Die folgenden Objekte können angelegt und in der zugehörigen Kinematik ausgewählt werden. Die Auswahl geschieht über eine Dropdown-Parameter-Liste in der Kinematik. Dort muss die entsprechende Objekt-ID (OTCID) ausgewählt werden.
Objekttyp | Beschreibung | Erforderliches Level und Version |
|---|---|---|
Werkzeugversatz - beschreibt ein Werkzeug auf Höhe des Kinematikflansches. | TF5110 TwinCAT 3 Kinematic Transformation (Level 1) | |
Werkzeug Linear - beschreibt ein am Kinematikflansch befestigtes 1D-Werkzeug, das die Möglichkeit bietet, den TCP in Richtung des Werkzeugs zu bewegen. | TF5110 TwinCAT 3 Kinematic Transformation (Level 1) | |
Antriebsdrehmoment - stellt die Trägheit und die Effizienz des Motors und des Getriebes dar, um das dynamische Modell genauer berechnen zu können. | TF5110 TwinCAT 3 Kinematic Transformation (Level 1) | |
Koordinatensystem - beschreibt ein benutzerdefiniertes Koordinatensystem. | TF5110 TwinCAT 3 Kinematic Transformation (Level 1) |
- Allgemeine Parameter für die Kinematik
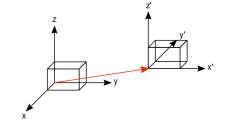
- Static Transformation
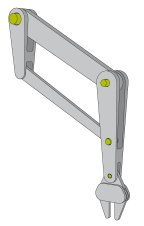
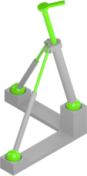
- 2D-Kinematics Type 1 (P_2C)
- 2D-Kinematics Type 2 (P_2C2)
- 2D-Kinematics Type 3 (S_CC)
- 2D-Kinematics H-Bot (P_2Y)
- 2D-Kinematics Type 5 (S_CC)
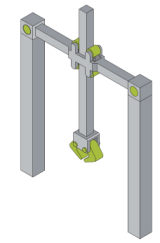
- 2D-Kinematics Type 6 (P_2X)
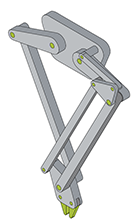
- 2D-Scissor Kinematics Type 1 (P_2X)
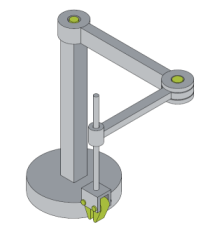
- 3D-Kinematics Type 8 (S_CCC)
- 3D-Delta Type 1 (P_3C)
- 3D-Delta Type 2 (P_3C2)
- 3D-Delta T Type 3 (P_3C3)
- 3D-Delta Y Type 4 (P_3C4)
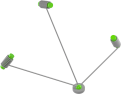
- 3D-Tripod Type 1 (P_3Z)
- 3D-Tripod Type 2 (P_3L)
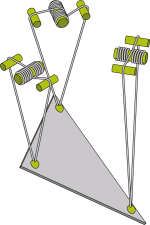
- 3D-Cable Kinematics Type 1 (P_3Z)
- 3D-Cable Kinematics Type 2 (P_3L)
- 3D-Kinematics Type 7 (PXX_SZ)
- 4D-SCARA (S_CCZC)
- 4D-Kinematics Type 6 (S_XCZC)
- 4D-Cable Kinematics (P_4L)
- 5D-Kinematics Type 2 (XYZab)
- 5D-Kinematics Type 3 (XYZAB)
- 6D-Stewart Platform (P_6L)
- Six Axis Articulated (S_CBBCBC)
- Antriebsdrehmoment (Drive Torque)
- Werkzeugversatz (Tool Offset)
- Werkzeug Linear (Tool Linear)
- Koordinatensystem (Coordinate Frame)