Allgemeine Parameter für die Kinematik
MCS Offset
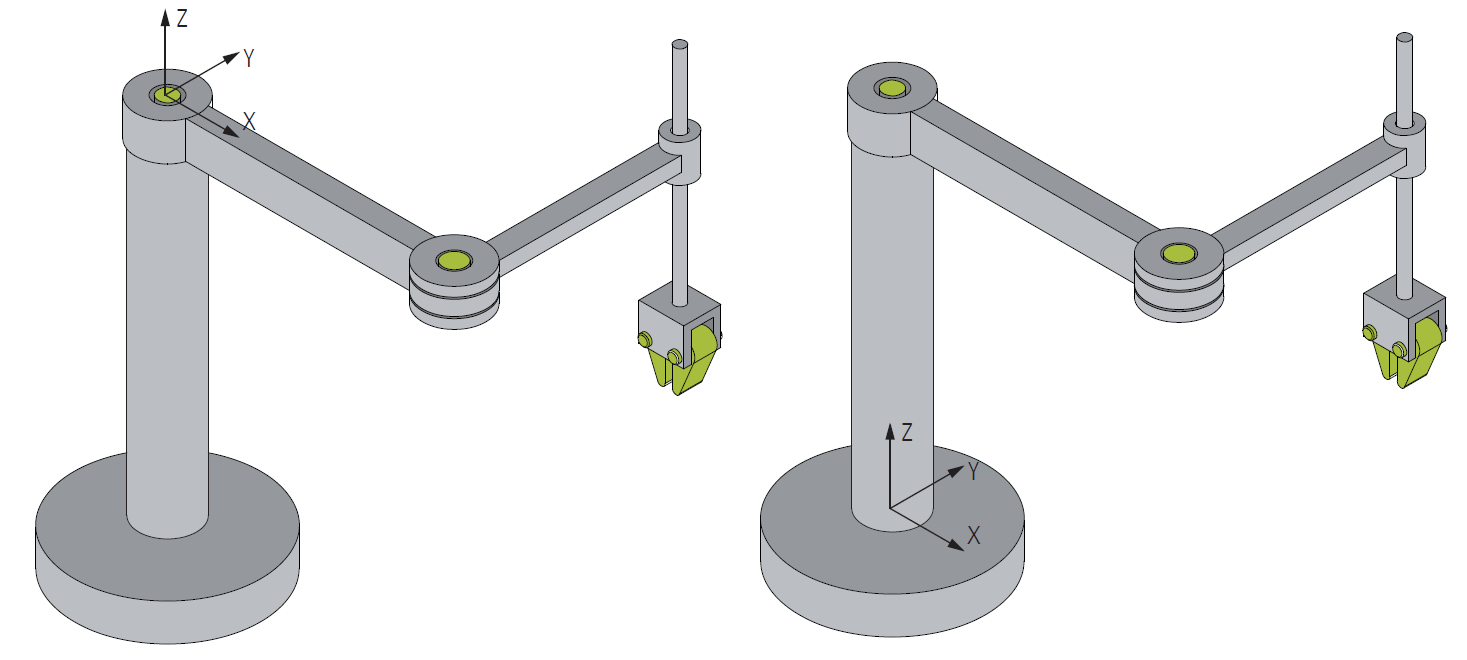
Mit dem MCS offset können zusätzliche Offset-Parameter vor der ersten Achse (bzw. vor der Basis) der Kinematik parametriert werden. Beispielsweise liegt bei der SCARA-Kinematik der Ursprung des MCS im ersten Gelenk (M1). Der Parameter Z-shift von dem MCS offset kann dazu genutzt werden, die zusätzliche Stablänge zu parametrieren, so dass der Ursprung des MCS im Fuß des Roboters liegt.
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
X-shift | Statischer X-offset im MCS. |
| mm |
Y-shift | Statischer Y-offset im MCS. |
| mm |
Z-shift | Statischer Z-offset im MCS. |
| mm |
MCS to Spatial reference
Mit dem Parameter Spatial reference kann das MCS in einem Referenzkoordinatensystem verschoben werden. Alle Koordinatensysteme sind rechtsdrehend (gegen den Uhrzeigersinn).
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Translation X | Verschiebung in X-Richtung. |
| mm |
Translation Y | Verschiebung in Y-Richtung. |
| mm |
Translation Z | Verschiebung in Z-Richtung. |
| mm |
Rotation 1 | Winkel, um den zuerst rotiert wird. Die Interpretation wird vom Parameter Rotation Convention definiert. |
| ° |
Rotation 2 | Winkel, um den als zweites rotiert wird. Die Interpretation wird vom Parameter Rotation Convention definiert. |
| ° |
Rotation 3 | Winkel, um den als drittes rotiert wird. Die Interpretation wird vom Parameter Rotation Convention definiert. |
| ° |
Rotation convention | Die Rotationskonvention gibt an, in welcher Reihenfolge um die Achsen rotiert werden soll (Parameter Rotation 1-3). Dabei geben die Buchstaben (X, Y, Z) von links nach rechts die Reihenfolge an, in der um die entsprechenden Achsen rotiert wird. Die nachfolgende Zahl gibt an, auf welchen Parameter (Rotation 1-3) der Wert zu parametrieren ist. Die translatorische Verschiebung wird immer vor der Rotation ausgeführt. |
|
|
Spatial reference | Der Parameter Spatial reference gibt an, auf welches Koordinatensystem als Basis sich das MCS bezieht. Wenn hier der Wert 0 eingestellt ist, dann wird das WCS als Basis verwendet. Wenn ein anderes Koordinatensystem als Ausgangspunkt für die Verschiebung genutzt werden soll, so kann ein Objekt Coordinate Frame angelegt werden. Die Objekt-ID dieses Koordinatensystems kann über das Dropdown-Menü ausgewählt werden. |
|
|
Definition direction | Gibt die Richtung an, in der die Verschiebung programmiert wird (aus Sicht des Bezugssystems oder aus Sicht des MCS), siehe Beispiel unten. |
|
|
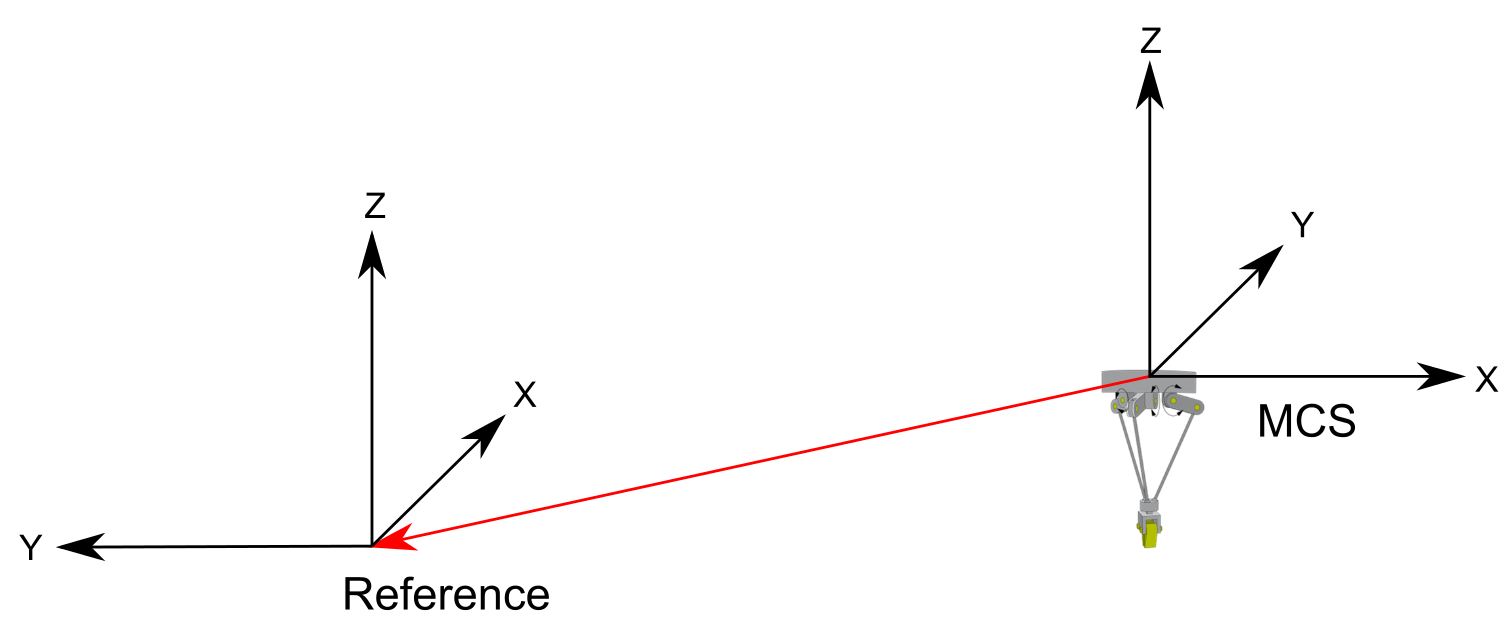
Beispiel: Definition Direction
Wenn man die Definition Direction MCS -> Reference verwendet, so wird die unten dargestellte Verschiebung vom Ausgangskoordinatensystem (MCS) zum Zielkoordinatensystem (Reference) mit negativen Vektoren angegeben.
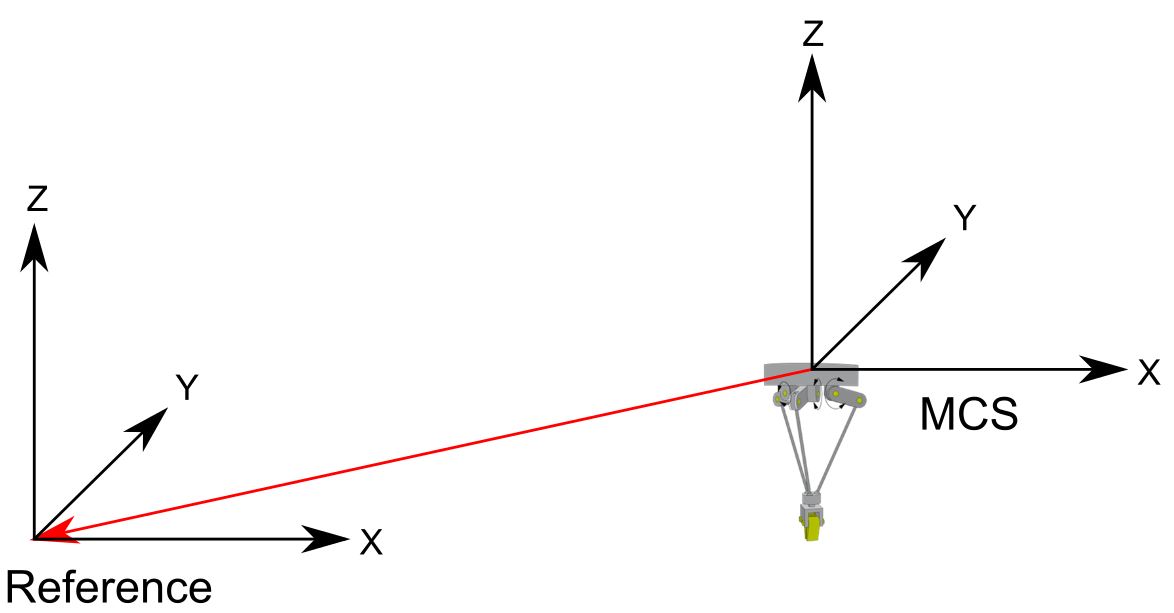
Wenn zusätzlich zur Translation eine positive Rotation um die Z-Achse (hier 90°) angegeben wird, so wird zuerst die Translation ausgeführt und anschließend das Zielkoordinatensystem gedreht (hier +90° um die Z-Achse).
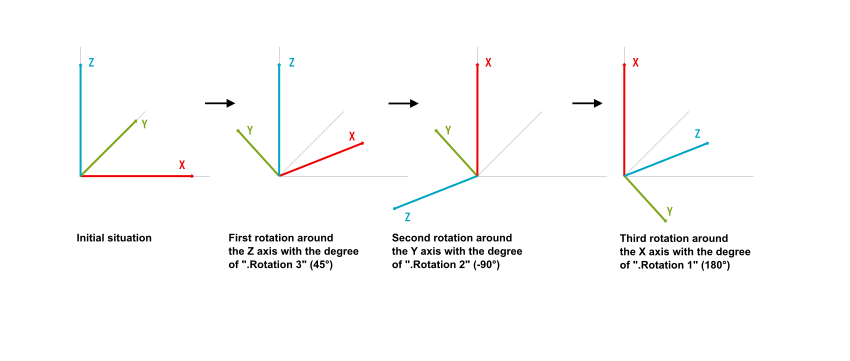
Beispiel: Rotation
Parameter | Beispiel Werte |
|---|---|
Rotation 1 | 180° |
Rotation 2 | -90° |
Rotation 3 | 45° |
Rotation convention | Rotation_Z3Y2_X1_DIN9300 |
Tool offset OID
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Tool offset OID | Soll für die Kinematik ein Werkzeug definiert werden, so muss zunächst ein Werkzeugversatz (Tool Offset) Objekt oder ein Werkzeug Linear (Tool Linear) Objekt angelegt werden. Die Objekt-ID dieses Werkzeugs kann über das Dropdown-Menü ausgewählt werden. |
|
|