6D-Stewart Platform (P_6L)
Für die kinematische Transformation 6D-Stewart Platform (P_6L) wird eine sich bewegende Plattform von sechs Zylindern getragen. Die Stewart Plattform ist eine parallele Kinematik mit sechs Freiheitsgraden.
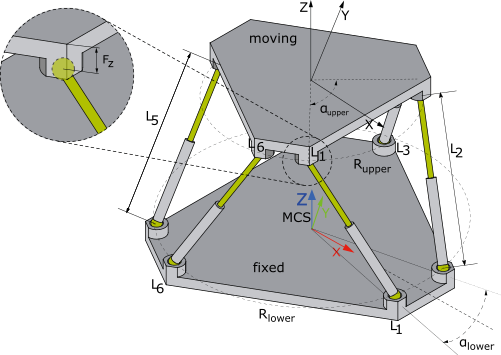
Die X-Achse des Maschinenkoordinatensystems (MCS) zeigt in Richtung des Punktes, der sich in der Mitte zwischen Gelenk 1 und 2 befindet. Der Nullpunkt in Z-Richtung liegt meist etwas über der unteren (Basis-)Plattform und in der Ebene, die durch die Gelenkmittelpunkte der Ankerpunkte aufgespannt wird.
Alle Gelenke auf einer Plattform befinden sich auf einer Kreisbahn und haben so den gleichen Abstand zum Plattformmittelpunkt. Dieser Abstand ist mit Rlower (untere Plattform) und Rupper (obere Plattform) anzugeben.
Der Winkel zwischen den Gelenken 1 und 2, welcher gleichermaßen auch zwischen den Gelenken 3 und 4 sowie zwischen den Gelenken 5 und 6 ist, ist mit αlower (untere Plattform) und αupper (obere Plattform) anzugeben.
Die ACS-Achspositionen beziehen sich immer auf die gesamte Zylinderlänge L. Ein Aufstarten mit einer ACS-Achsposition gleich 0 ist daher nicht möglich.
Parameter für die Kinematik
Für die Stewart Kinematik gibt es die folgenden Parameter:
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Flange translation Z | Verschiebt die obere Ebene auf die Oberfläche der oberen Plattform, sodass die Stärke der Plattform berücksichtigt wird. |
| mm |
Tool offset OID | Die Werkzeug-Ausdehnung setzen. |
|
|
Lower radius Rlower | Radius der unteren Plattform. Beschreibt den Abstand vom Ursprung im Zentrum der unteren Plattform zu den Armgelenken der unteren Plattform. |
| mm |
Upper radius Rupper | Radius der oberen Plattform. Beschreibt den Abstand vom Ursprung im Zentrum der oberen Plattform zu den Armgelenken der oberen Plattform. |
| mm |
Lower angle αlower | Der Winkel αlower beschreibt den Winkel zwischen den Ankerpunkten von L1 und L2, L3 und L4, L5 und L6 auf der unteren Plattform. |
| ° |
Upper angle αupper | Der Winkel αupper beschreibt den Winkel zwischen den Ankerpunkten von L1 und L2, L3 und L4, L5 und L6 auf der oberen Plattform. |
| ° |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4024.11 TF5400 TwinCAT 3 Advanced Motion Pack V3.1.6.67 | PC or CX (x86 or x64) | TF5113 TwinCAT 3 Kinematic Transformation (Level 4) |
 | TF5113 | TwinCAT Kinematic Transformation L4 TF5113 | TwinCAT 3 Kinematic Transformation L4 unterliegt rechtlichen Beschränkungen und ist nicht im Workload TF5400.AdvancedMotionPack bzw. im TF5400 TwinCAT Advanced Motion Pack Setup von der Webseite enthalten. Bei Bedarf wenden Sie sich bitte an Ihren Vertriebskontakt. |