3D-Delta Type 1 (P_3C)
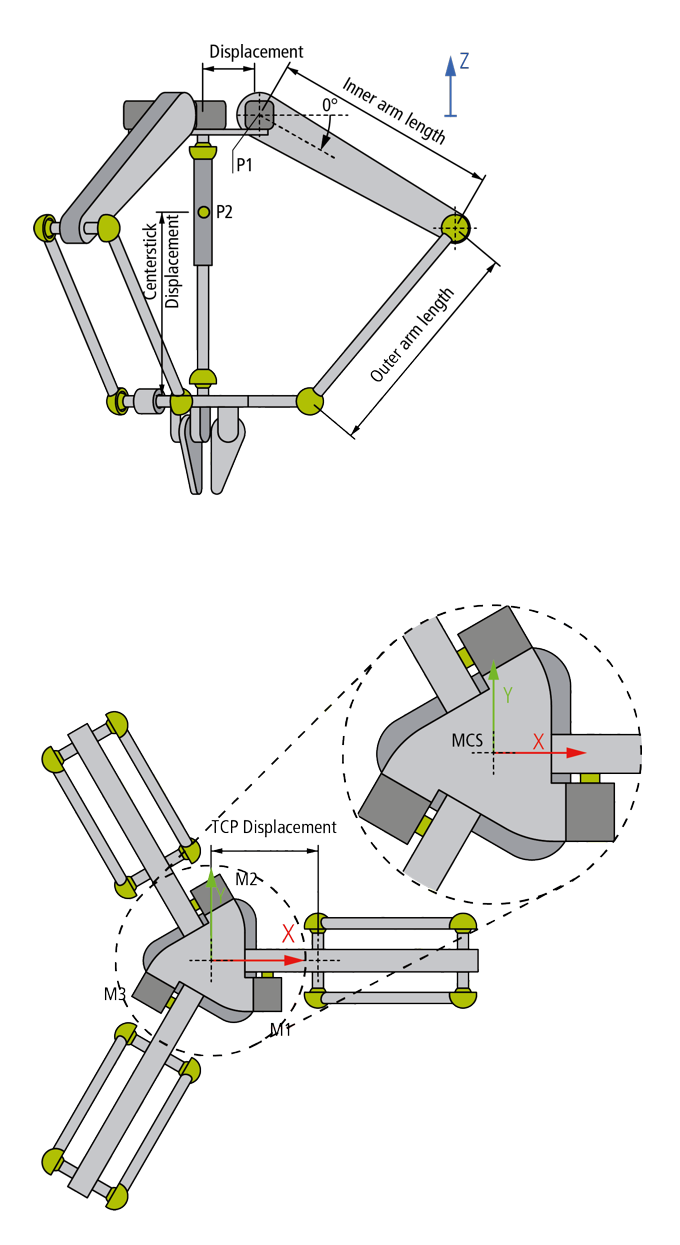
Der 3D-Delta Type 1 (P_3C) ist, wie oben im Schema gezeigt, aufgebaut. Die kinematische Transformation erwartet Kugelgelenke (oder Elemente mit gleichem Verhalten) in der Verbindung der Arme und mit der unteren Platte.
Der Zentrierstab für die Ausrichtung des Greifers kann optional parametriert werden.
Alle Motorachsen sind in Grad skaliert und 0° ist, wie oben im Schema gezeigt, definiert, wobei der Pfeil die positive Richtung anzeigt. Das gilt für alle 3 Motoren.
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Inner arm length | Länge von Drehpunkt zu Drehpunkt des inneren Arms - das ist der Arm, der direkt mit dem Motor verbunden ist. |
| mm |
Outer arm length | Länge von Drehpunkt zu Drehpunkt des äußeren Arms |
| mm |
Displacement | Länge vom Mittelpunkt der Grundplatte bis zu den virtuellen Drehachsen des inneren Arms |
| mm |
TCP displacement | Länge vom Mittelpunkt der Greiferplatte bis zu den virtuellen Drehachsen des äußeren Arms |
| mm |
Parameter für das dynamische Modell
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Inner arm mass | Gesamtmasse des inneren Arms |
| kg |
Inner arm moment of inertia | Trägheitsmoment des inneren Arms in Bezug zum Drehpunkt P1, der mit dem Motor verbunden ist |
| kg mm^2 |
Outer arm mass | Masse des äußeren Arms. Sind zwei Stäbe vorhanden, wird die Gesamtmasse benötigt. Die Gelenkmasse kann optional als eigener Parameter beschrieben werden. |
| kg |
Link mass | Masse des Gelenks, das den inneren und äußeren Arm verbindet. Kann verwendet werden, wenn die Gelenkmasse nicht bereits in den äußeren und inneren Armen enthalten ist. |
| kg |
TCP mass | Masse des TCP, einschließlich Greiferplatte und Greifer. Die Nutzlast wird normalerweise mit Hilfe eines getrennten Parameters beschrieben. |
| kg |
Center stick mass | Gesamtmasse des Zentrierstabs |
| kg |
Center stick: moment of inertia | Trägheitsmoment des Zentrierstabs in Bezug auf den Schwerpunkt (P2) |
| kg mm^2 |
Center stick: center of mass displacement | Länge von Greiferplatte zum Schwerpunkt des Stabs |
| mm |
First drive torque OID | Objekt-ID des ersten Antriebsdrehmoments (siehe hier) |
|
|
Second drive torque OID | Objekt-ID des zweiten Antriebsdrehmoments |
|
|
Third drive torqueOID | Objekt-ID des dritten Antriebsdrehmoments |
|
|
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |