2D-Kinematics Type 6 (P_2X)
Über die Kinematik ermöglichen die beiden Linearachsen M1 und M2 Bewegungen in der XY-Ebene.
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Flange translation X | Räumliche Verschiebung in X-Richtung. |
| mm |
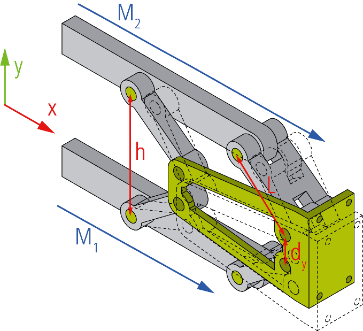
Arm length (L) | Länge der Verbindungssegmente jeweils vom Motor zum Gelenk des Flansches gemessen. |
| mm |
Motor distance (h) | Der Motorabstand h ist der y-Abstand der Gelenke an den Motoren. (Die Motoren M1 und M2 verfahren beide in X-Richtung. Der Motorabstand h wird von Gelenkmittelpunkt zu Gelenkmittelpunkt gemessen.) |
| mm |
Link distance (dy) | Die Link Distance dy ist der Abstand zwischen den Gelenken im Flansch. |
| mm |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5111 TwinCAT 3 Kinematic Transformation (Level 2) |