2D-Kinematics H-Bot (P_2Y)
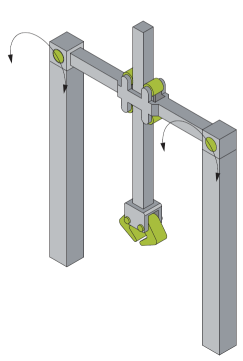
Die 2D-Kinematics H-Bot (P_2Y) ist, wie oben im Schema gezeigt, aufgebaut.
Die Motorachsen müssen in Millimetern skaliert werden. Alle anderen Positionsparameter ergeben sich aus den kinematischen Zwangsbedingungen.
Der Ursprungspunkt des Maschinenkoordinatensystems MCS ist durch den Punkt definiert, für den die Positionen der beiden Motoren gleich null sind.
Parameter für das dynamische Modell
Parameter | Beschreibung | Typ |
|---|---|---|
FirstDriveTorqueOID | Objekt-ID des ersten Antriebsdrehmoments (siehe Antriebsdrehmoment (Drive Torque)). |
|
SecondDriveTorqueOID | Objekt-ID des zweiten Antriebsdrehmoments |
|
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5111 TwinCAT 3 Kinematic Transformation (Level 2) |