Six Axis Articulated (S_CBBCBC)
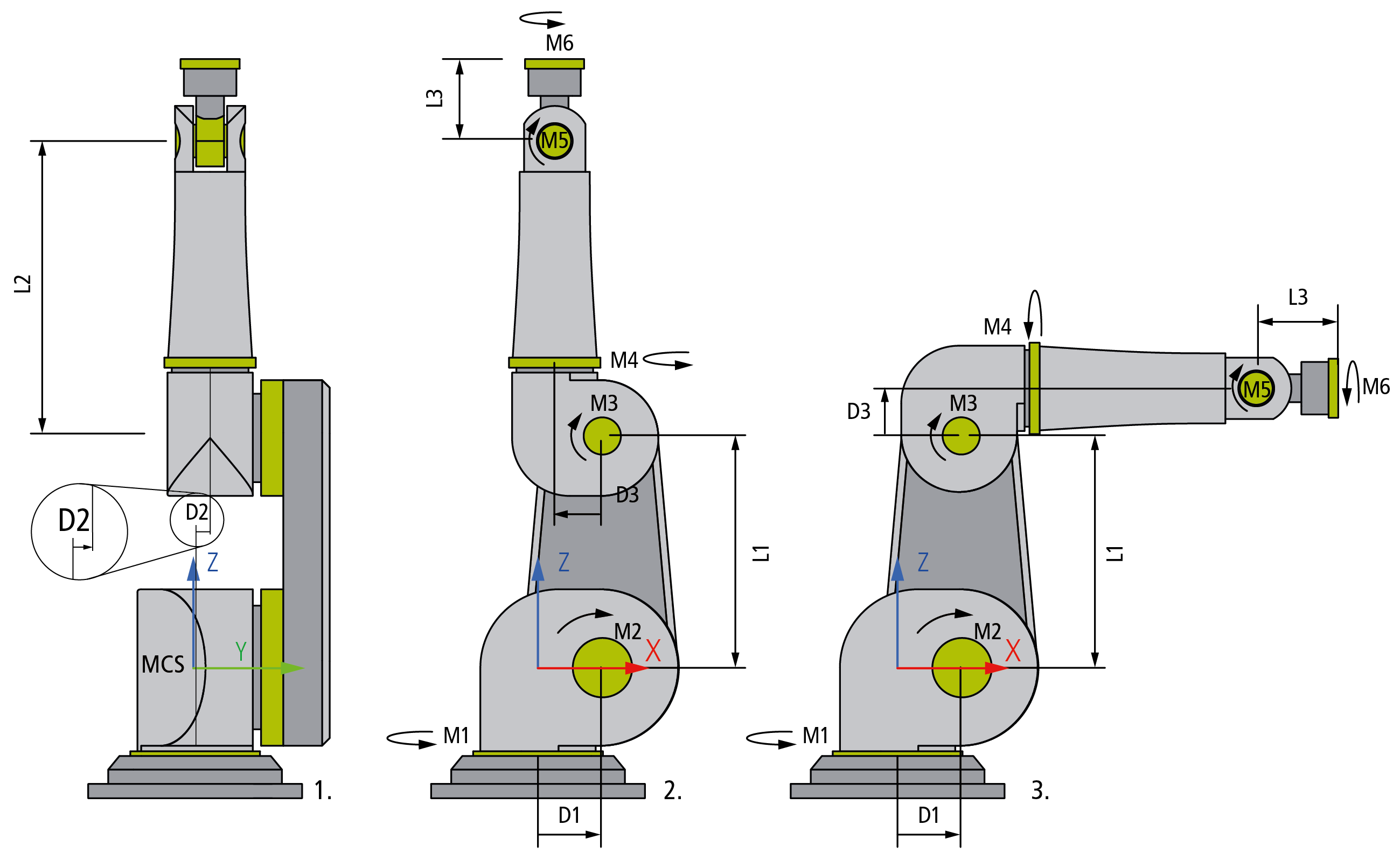
Auf die Motorachsen der Six Axis Articulated (S_CBBCBC) Kinematics wird in der Einheit Grad Bezug genommen. Die Zeichnungen 1. und 2. oben zeigen die Kinematik mit allen Achsen in der Nullposition. Die Nullpositionen der Achsen M4 und M6 sind so definiert, dass das Maschinen-Koordinatensystem und das Flansch-Koordinatensystem die gleiche Orientierung haben. Die Zeichnung 3. zeigt die Achse M3 in 90° Position.
Der MCS Ursprung liegt im Schnittpunkt des ersten kinematischen Gelenks M1 mit dem zweiten kinematischen Gelenk M2. Er ist so orientiert, dass das Gelenk M2 eine Rotation um die Y-Achse beschreibt. Die Mitte von M1 beschreibt die X-Nullkoordinate. Der Schnittpunkt von M1 und M2 beschreibt die Y-Nullkoordinate. Die Mitte von M2 beschreibt die Z-Nullkoordinate.
 | Singuläre Positionen Die in den Bildern 1., 2. und 3. dargestellten Positionen können nicht im kartesischen Modus angefahren werden, weil sich der Roboter jeweils in einer singulären Position befindet. Ein Anfahren dieser Positionen ist nur im Achs-Modus (Direct Mode) möglich. |
Parameter für die Kinematik
Für die “Six Axis Articulated” Kinematics, eine serielle Sechs Achsen Kinematik, gibt es die folgenden Gelenk-Parameter.
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Arm length L1 | Abstand zwischen den Motorachsen M2 und M3. |
| mm |
Arm length L2 | Abstand zwischen den Motorachsen M3 und M5. |
| mm |
Arm length L3 | Abstand zwischen der Motorachse M5 und dem Flansch. |
| mm |
Arm offset D1 | Abstand zwischen den Motorachsen M1 und M2 in X-Richtung. |
| mm |
Arm offset D2 | Abstand in Y-Richtung zwischen den Motorachsen M1 and M4. |
| mm |
Arm offset D3 | Abstand in X-Richtung zwischen den Motorachsen M3 und M5. Das Vorzeichen im Beispielbild ist positiv. |
| mm |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
| TF5113 | TwinCAT Kinematic Transformation L4 TF5113 | TwinCAT 3 Kinematic Transformation L4 unterliegt rechtlichen Beschränkungen und ist nicht im Workload TF5400.AdvancedMotionPack bzw. im TF5400 TwinCAT Advanced Motion Pack Setup von der Webseite enthalten. Bei Bedarf wenden Sie sich bitte an Ihren Vertriebskontakt. |