4D-SCARA (S_CCZC)
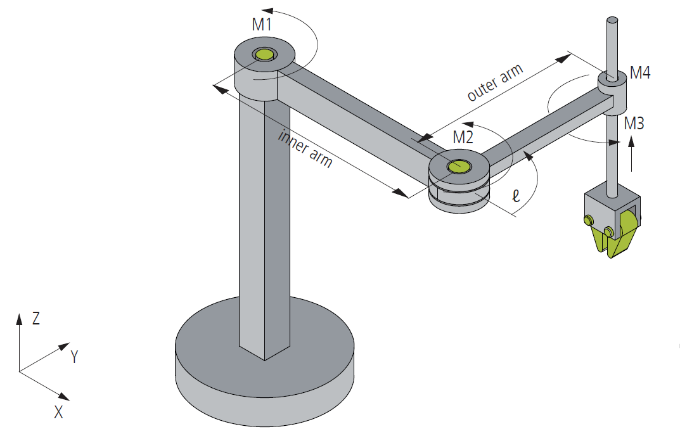
Die 4D-SCARA (Selective Compliance Assembly Robot Arm) Kinematics (S_CCZC) ist, wie oben im Schema gezeigt, aufgebaut.
Die Motorachsen 1, 2 und 4 sind in Grad skaliert, wobei die positive Drehrichtung in Pfeilrichtung ist. Die dritte Motorachse ist in Millimetern skaliert.
Der Nullpunkt des MCS befindet sich im ersten Gelenk (M1). Die X-Achse wird vom SCARA-Arm bestimmt, wenn alle Drehmotorachsen bei 0° stehen.
 | Die Strecklage des SCARA-Arms (alle Drehmotorachsen auf Position 0°) kann nicht im kartesischen Modus angefahren werden, weil sich der Roboter dort in einer singulären Position befindet. Ein Anfahren dieser Positionen ist nur im Achs-Modus (Direct Mode) möglich. |
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Inner arm length | Länge von Drehpunkt zu Drehpunkt des inneren Arms; dieses ist der Arm auf der Nullpunktseite. |
| mm |
Outer arm length | Länge von Drehpunkt zu Drehpunkt des äußeren Arms; dieses ist der Arm auf der TCP-Seite. |
| mm |
Gear coupling | Kopplungsfaktor zwischen den Achsen M4 und M3. |
| mm/° |
Flange rotation A | Drehwinkel um die lokale X-Achse herum. |
| ° |
Tool offset OID | Objekt ID eines Werkzeugs, das am Kinematik-Flansch befestigt ist. Das Flansch-Koordinatensystem ist 180° um die X-Achse gedreht, so dass seine Z-Achse nach unten zeigt. |
|
|
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |