Supported Transformations
Overview
|
Transformation Type |
Scheme |
Required Level and Version |
|---|---|---|
|
|
Level 1 Version 2.11.0 Build 3 | |
|
|
Level 2 Version 2.11.0 Build 3 | |
|
|
Level 2 Version 2.11.0 Build 3 | |
|
|
Level 2 Version 2.11 Build 6 | |
|
|
Level 2 Version 2.11 Build 6 | |
|
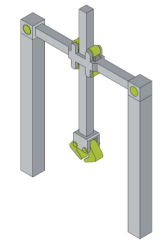
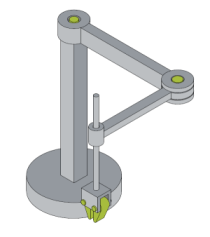
2D-Kinematics Type 6 (P XX) |
|
Level 2 |
|
|
Level 3 Version 2.11.0 Build 3 | |
|
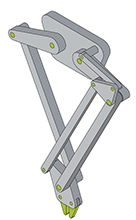
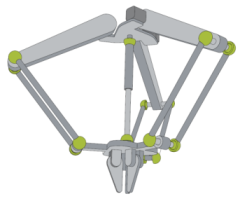
Delta Type 2 |
|
Level 3 |
|
|
Level 3 | |
|
|
Level 4 |

Additional Objects
|
Object type |
Description |
Required Level and Version |
|---|---|---|
|
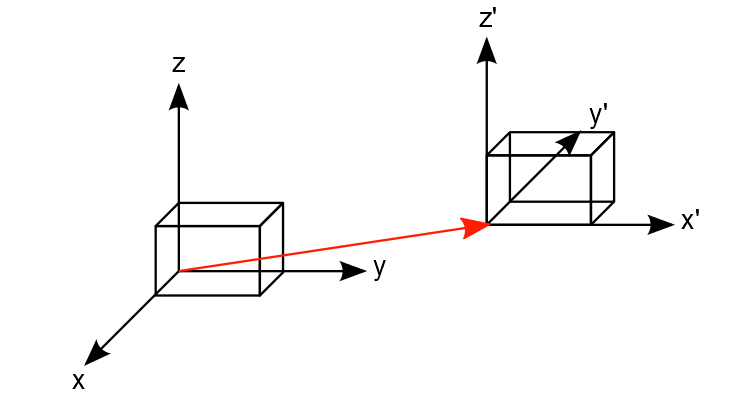
Describes a user defined coordinate system. |
Level 1 | |
|
Describes a tool at the kinematics flange. |
Level 1 | |
|
Describes a 1D tool attached to the kinematics flange which offers the possibility to move TCP in tool direction. |
Level 1 | |
|
Represents the inertia and efficiency of motor and gear box to calculate the dynamic model more precisely. |
Level 1 |