Static Transformation
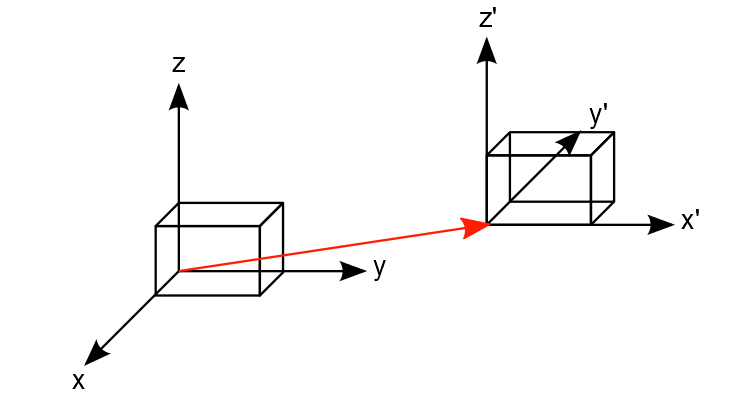
The static transformation supports a translation and rotation. By using this transformation, it is possible to define a User Coordinate System (UCS). This module takes care of the transformation from UCS to the Machine Coordinate System (MCS).
The parameterization is done from MCS to UCS (forward transformation).
First the translation must be described and then the rotation is calculated. Therefore the yaw-pitch-roll-rule that is described in DIN9300 is used. The calculation sequence for the forward transformation is Z, Y', X''
|
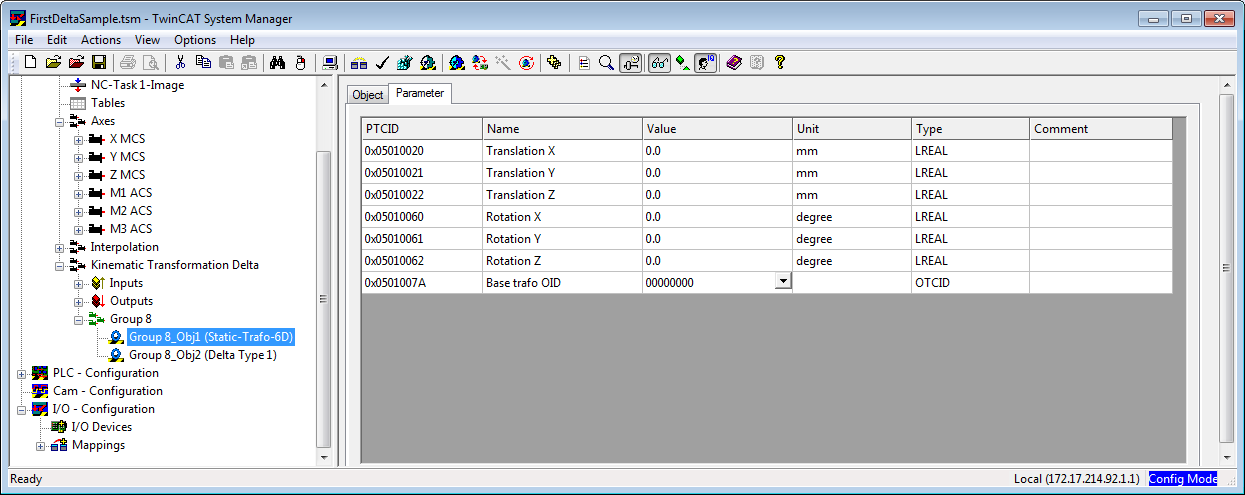
Parameter |
Description |
Unit |
|---|---|---|
|
Translation X |
Shift in x direction from MCS to user defined coordinate system |
mm |
|
Translation Y |
Shift in y direction from MCS to user defined coordinate system. |
mm |
|
Translation Z |
Shift in z direction from MCS to user defined coordinate system |
mm |
|
Rotation X |
Right handed rotation around the x''-axis in degree |
degree |
|
Rotation Y |
Right handed rotation around the y'-axis in degree |
degree |
|
Rotation Z |
Right handed rotation around the z-axis in degree |
degree |
|
Base Trafo OID |
In case of a cascaded static transformation object id of the base transformation is parameterized here |
|