SCARA
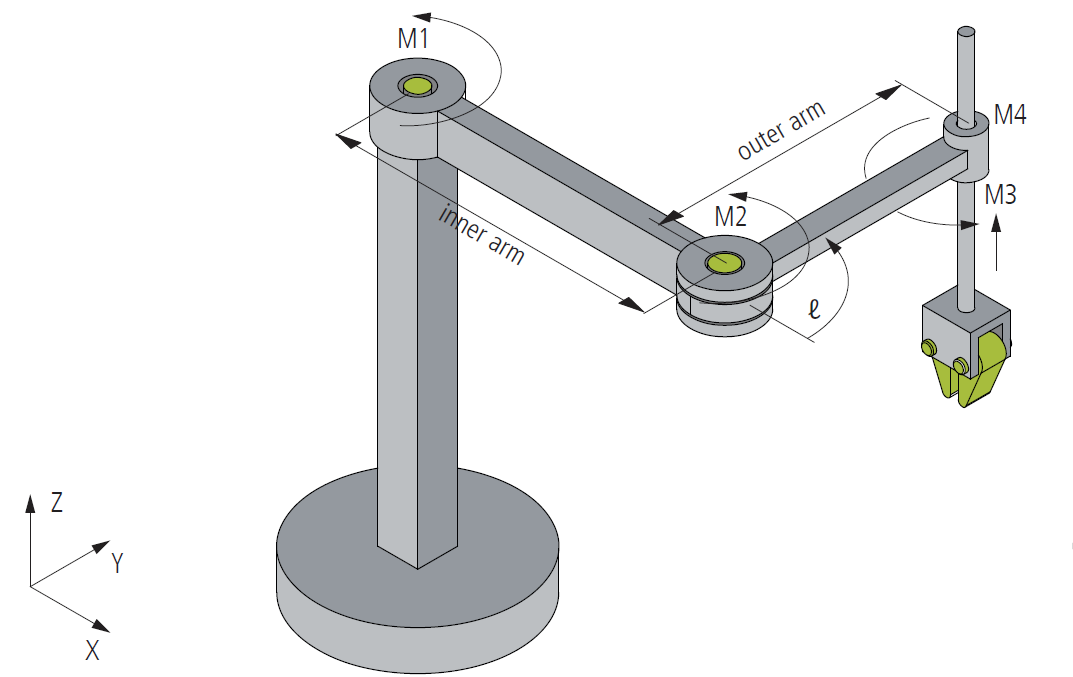
The SCARA (Selective Compliance Assembly Robot Arm) kinematics is built up as shown in the schema above.
The motor axes 1, 2 and 4 are scaled in degree with positive direction in direction of the arrow. The third motor axis is scaled in mm.
The origin of the MCS is set at the first joint (M1). The x-axis is defined by the SCARA arm when all rotary motor axes are 0°.
Parameter for kinematics
|
Parameter |
Description |
Unit |
|---|---|---|
|
Inner arm length |
Length from pivot point to pivot point of the inner arm. This is the arm at the side of the base. |
mm |
|
Outer arm length |
Length from pivot point to pivot point of the outer arm. This is the arm at the side of the TCP |
mm |
|
Tool offset |
Object ID of a tool attached at the flange of the kinematics. |
|
|
MCS2WCS OID |
Object ID of a static transformation which defines the position of MCS in base coordinate system (normally WCS). |
|
Required Product Level:
Level 3