IDN 3027 (P-0-3027) Manufacturer Homing Modes
Selection of manufacturer defined homing modes. Use IDN 41 , IDN 42 and IDN 147 to set the homing velocity, acceleration and direction. This IDN contains the saved serial command NREF after reset. Write this P IDN or write IDN 147 through the service channel, could change the used homing mode for the drive controlled homing ( IDN 148 ). After or while homing with SERCOS the parameter NREF contains the value of this IDN. A following SAVE command can save this value permanent.
For an explanation of the homing modes 0, 3, 4, 5 and 6 please refer to the Kollmorgen manual „Setup Software SR600.exe for ServoSTAR 600.“
Standard SERCOS homing (mode 1): For an explanation of the standard homing mode, please refer to the IEC 61491 Standard or to the Kollmorgen manual „Setup Software SR600.exe for ServoSTAR 600.“ This is the default value also for IDN 147 (refer to IDN 147 ).
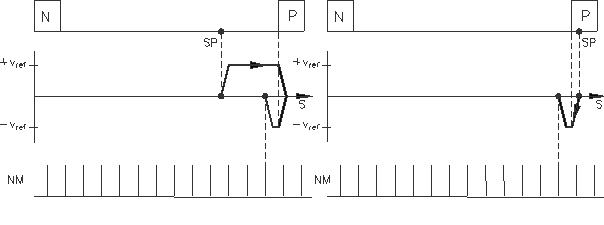
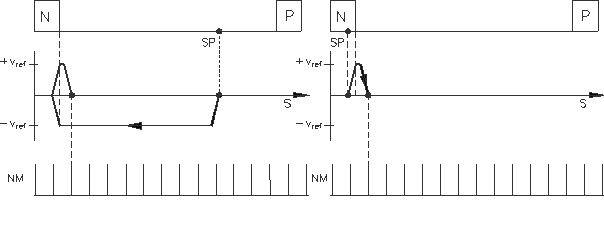
Hardware Limit Switch Homing (mode 2): This homing mode uses a hardware limit switch as the home switch. The following diagrams show this homing option, without reference switch, in both the positive and the negative directions of motion with zero mark of the feedback.
Warning: Hardware limit switches must be present and connected. The appropriate limit switch functions must be switched on, i.e. digital input 3 must be PSTOP ( IDN 3002 mode 2) and/or digital input 4 must be NSTOP ( IDN 3003 mode 3).
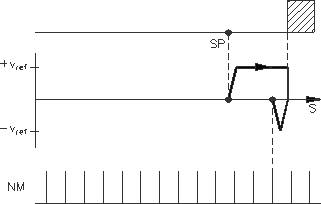
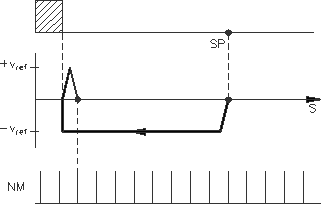
Mechanical Stop Homing (mode 7): This homing mode uses the mechanical stop instead of a separate homing switch or a hardware limit switch. Set the maximum current (torque) limit through IDN 92 , to limit the torque applied against the mechanical stop. The mechanical stop must be fixed in place and hardware limit switches must be disabled in the direction of the mechanical stop. It is not possible to re-enable or disable hardware limit switches in CP4. When motion toward the stop is no longer possible, the following error increases and triggers a movement back to the first zero mark. The following diagrams show this homing option, in both the positive and the negative directions of motion.
|
|
Data Length: | 2 bytes | Non-Volatile: | No |
Data Type: | Unsigned decimal | Write Access: | CP2, CP3, CP4 |
Minimum: | 0 | Run-Up Check: |
|
Maximum: | 7 | Cyclic Transfer: |
|
Default: | 1 | Serial Equiv: | NREF |
Units: |
| Version: | |
IDN Type: | PS:VE | ADS Index Group (hex.): | 0x8BD3 |
Definition:
Mode | Function | IDN 147 (bits 7-0) |
|---|---|---|
0 | Set reference point to the actual position | 1110 0xxx |
1 | Traverse to the reference switch with zero-mark recognition | 1000 010x |
2 | Move to hardware limit-switch, with zero-mark recognition | 1000 010x |
3 | Move to reference switch, without zero-mark recognition | 1100 010x |
4 | Move to hardware limit-switch, without zero-mark recognition | 1100 010x |
5 | Move to the next zero-mark of the feedback unit | 1010 0xxx |
6 | Set reference at actual position, without losing target position | 1110 0xxx |
7 | Move to mechanical stop with zero-mark recognition | 1000 010x |
8 | Move to absolute SSI-position |
|
9 | Move to mechanical stop without zero-mark recognition |
|