Steuerkommandos eines Kanals
Überlesemodus NC-Satz | |
Beschreibung | Schaltet den Überlesemodus auf Interpreterebene für das NC-Programm EIN/AUS. Der Status des Überlesemodus wird nur am NC-Programmstart ausgewertet. Eine Umschaltung während der Ausführung eines NC-Programms hat keine Wirkung. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_ProgramBlockIgnore |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Überlesemodus NC-Satz EIN, FALSE = Überlesemodus NC-Satz AUS, FALSE] |
Umleitung | |
ST-Element | . X_Enable |
 Datentyp
DatentypEinzelsatzmodus auf Interpreterebene NC-Satz | |
Beschreibung | Schaltet den Einzelsatzmodus auf Interpreterebene EIN/AUS. Für jeden Satz muss ein erneuter Start vorliegen |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten | Wird derzeit noch nicht unterstützt |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_SingleBlock |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Einzelsatzmodus EIN, FALSE] |
Umleitung | |
ST-Element | . X_Enable |
Freigabe Bearbeitung nächster NC-Satz | |
Beschreibung | Freigabe zur Bearbeitung des nächsten NC-Satzes. Dieses Element dient zur Synchronisation der Geometriekette mit der PLC. Die PLC blockiert hierzu die Einzelsatzweiterschaltung und stoppt damit den Interpreter. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten | Wird derzeit noch nicht unterstützt. |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_ContinueMachining |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE, FALSE] |
Umleitung | |
ST-Element | . X_Enable |
Fortsetzung NC-Programm-Dekodierung | |
Beschreibung | Setzt die Dekodierung eines NC-Programms fort, nachdem ein Fehler aufgetreten ist, wenn Syntaxcheck (Simulationsbetrieb) und interaktive Weiterschaltung der Dekodierung aktiviert ist (Decoderparameter, Kenngröße: syn_chk.interaktiv = 1). |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten | Wird derzeit noch nicht unterstützt. |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_ReleaseStop |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE, FALSE] |
Umleitung | |
ST-Element | . X_Enable |
Stopp NC-Programm-Dekodierung | |
Beschreibung | Stoppt die Dekodierung eines NC-Programmes, wenn im Simulationsbetrieb Syntaxcheck die interaktive Freigabe der Weiterverarbeitung des NC-Programms aktiviert wurde. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten | Wird derzeit noch nicht unterstützt. |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_DecStop |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE, FALSE] |
Umleitung | |
ST-Element | . X_Enable |
Kanalbetriebsart | |
Beschreibung | Anwahl einer speziellen Kanalbetriebsart, wie z.B. Syntaxcheck oder Fertigungszeitberechnung |
| MCControlSGN32Unit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlSGN32Unit_ExecutionMode |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .D_Command .D_Request . D_State |
Datentyp | DINT |
Wertebereich | 0x0000 ISG_STANDARD Normalbetrieb 0x0001 SV Satzvorlauf 0x0002 SOLLKON Simulation Sollkonturvisualisierung mit Ausgabe der Visualisierungsdaten 0x0802 SOLLKON Simulation Sollkonturvisualisierung ohne Ausgabe der Visualisierungsdaten 0x0004 ON_LINE Simulation Onlinevisualisierung 0x0008 SYNCHK Simulation Syntaxcheck 0x0010 PROD_TIME Simulation Fertigungszeitberechnung 0x0020 ONLINE_PROD_TIME Simulation Online- 0x0040 MACHINE_LOCK Dry run ohne Achsbewegung 0x0080 TECHNO_FILTER Dry run TECHNO-Filter 0x0100 KIN_TRAFO_OFF Überschreibt die automatische |
Umleitung | |
ST-Element | . X_Enable |
Index der Platzversatzgruppe | |
Beschreibung | Durch einen Platzversatz wird eine zusätzliche Verschiebung definiert, mit der z.B. unterschiedliche Aufspannpositionen eines Werkstückes im Arbeitsraum einer Maschine berücksichtigt werden können. Platzversätze werden in den Platzversatzdaten festgelegt. Innerhalb einer Platzversatzgruppe werden die Platzversätze für jede Achse angegeben. Die Auswahl einer Platzversatzgruppe erfolgt über den Index der Gruppe. Die Daten der Platzversätze werden beim Programmstart vom CNC ausgewertet. |
| MCControlSGN16Unit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlSGN16Unit_ClampPosition |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .D_Command .D_Request .D_State |
Datentyp | INT |
Wertebereich | [0, 67] |
Umleitung | |
ST-Element | . X_Enable |
Vorschubstopp EIN/AUS | |
Beschreibung | Kanalspezifischer Vorschubstopp. Das Setzen dieses Elements auf TRUE bewirkt während der Interpolation ein sofortiges Abrampen der Vorschubgeschwindigkeit entsprechend den eingestellten Beschleunigungen auf den Vorschub = 0. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_FeedHold |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request .X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Vorschubstopp EIN, FALSE] |
Umleitung | |
ST-Element | . X_Enable |
Der Kanal kann durch das Setzen des Vorschubstopps (FEEDHOLD) oder durch ein MCM-STOP-Kommando in der aktuellen Betriebsart (s Zustandsgraph der Betriebsarten) angehalten werden. In beiden Fällen zeigt die Betriebsart den Zustand HOLD an.
Ebenso kann nach einem Anhalten der Kanal durch das Wegnehmen des Vorschubstopps oder durch eine MCM-RESUME wieder fortgesetzt werden.
D.h. die beiden Signale FEEDHOLD oder MCM-STOP können symmetrisch verwendet werden. Bei einem MCM-STOP wird intern eine FEEDHOLD ausgelöst. D.h. die SPS muss die Vorschubstopp-Control Unit versorgen, damit das MCM-STOP-Kommando durchgesetzt wird.
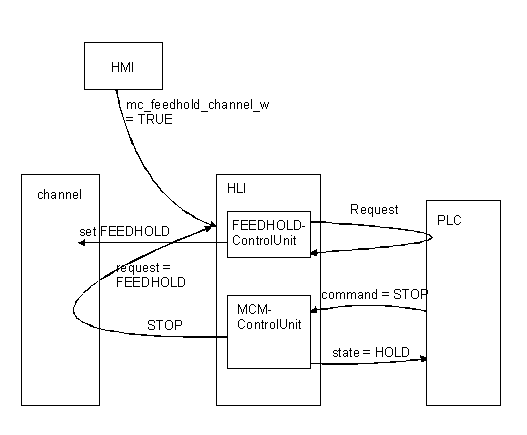 Abb.9: Abbildung 4-1: Interaktion Vorschubstop und MCM-STOP
Abb.9: Abbildung 4-1: Interaktion Vorschubstop und MCM-STOPNothalt, Kanal | |
Beschreibung | Wenn dieses Element für Nothalt aktiv (TRUE) gesetzt wird, erfolgt ein sofortiges Abbrechen der Interpolation durch Ausgabe des Sollwertes Null bzw. durch eine Verzögerung entsprechend der Notfallverzögerung. Der NC-Kern geht in den Fehlerzustand über. Diese Art der Bewegungsbeeinflussung hat höchste Priorität. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_EmergencyStop |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | . X_Command .X_Request .X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Nothalt aktiv, FALSE] |
Umleitung | |
ST-Element | .X_Enable |
Einzelsatzbetrieb | |
Beschreibung | Einzelsatzbetrieb ein-/ausschalten. Der Einzelsatzbetrieb bezieht sich nur auf Bewegungssätze. Solange der Einzelsatzbetrieb eingeschaltet ist, wird am Ende jedes Bewegungssatzes auf Vorschub = 0 abgebremst. Nachfolgende Sätze können nur dann durch Setzen des Elements „continue motion“ ausgeführt werden, wenn sich alle Achsen im Regelfenster befinden. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_SingleBlock |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request .X_State |
Datentyp | BOOL |
Wertebereich | [TRUE, FALSE] |
Umleitung | |
ST-Element | .X_Enable |
Wahlweiser Halt | |
Beschreibung | Wahlweisen Halt ein-/ausschalten. Wenn im aktuellen Satz des NC-Programms die Funktion M01 (Wahlweiser Halt) programmiert ist, kann durch das Setzen dieses Elements auf den Wert TRUE am Satzende angehalten werden (rampenförmiges Abbremsen gemäss den zulässigen Beschleunigungen). Der nachfolgende Satz kann durch Aktivieren des Elements „continue machining“ freigegeben werden, wenn der NC-Kern Durch Rücksetzen der Statusanzeige X_WaitAxesInPosition anzeigt, dass sich alle Achsen im Regelfenster befinden. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_M01StopEnable |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request .X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Wahlweiser Halt aktiv, FALSE] |
Umleitung | |
ST-Element | .X_Enable |
Fortsetzung der Bewegung | |
Beschreibung | Wird der Wert des Elements „Fortsetzung der Bewegung“ auf TRUE gesetzt, so wird die durch die Anwahl von „Einzelsatzbetrieb“ und/oder „Wahlweiser Halt“ und/oder durch M00 im NC-Programm programmierten Halt unterbrochene Programmbearbeitung wieder aufgenommen. Voraussetzung dafür ist, dass sich alle Achsen im Regelfenster befinden. Bei jeder steigenden Flanke an diesen Eingang wird ein NC-Satz abgearbeitet. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten | Flankenauswertung |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_ContinueMotion |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request .X_State |
Datentyp | BOOL |
Wertebereich | [TRUE, FALSE] |
Umleitung | |
ST-Element | .X_Enable |
Bearbeitungssimulation EIN/AUS | |
Beschreibung | Ein-/Ausschalten der Bearbeitungssimulation. Während der Bearbeitungssimulation werden alle Technologiefunktionen des NC-Programms nicht an die PLC ausgegeben, sondern intern quittiert. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_MachiningSimulation |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request .X_State |
Datentyp | BOOL |
Wertebereich | [TRUE, FALSE] |
Umleitung | |
ST-Element | . X_Enable |
Vorschuboverride | |
Beschreibung | Durch den Vorschuboverride kann die programmierte Bahngeschwindigkeit mit einem zusätzlichen Faktor gewichtet werden. |
| MCControlUNS16Unit, s. Beschreibung Control Unit |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS16Unit_OverrideFeedrate |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .D_Command .D_Request .D_State |
Einheit | 0.1 % |
Datentyp | UINT |
Wertebereich | [0, P-CHAN-00056] Beim Parameter P-CHAN-00056 handelt es sich um einen kanalspezifischen Parameter. Sein Wert ist typischerweise 1000. Siehe [CHAN]. |
Umleitung | |
ST-Element | .X_Enable |
Eilgangoverride | |
Beschreibung | Durch den Eilgangoverride können G0 Verfahrbewegungen mit einem Faktor gewichtet werden. Siehe auch Besonderheiten! |
| MCControlUNS16Unit, s. Beschreibung Control Unit |
Zugriff | PLC Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS16Unit_OverrideRapidMove |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .D_Command .D_Request .D_State |
Einheit | 0.1 % |
Datentyp | UINT |
Wertebereich | [0, 1000] |
Umleitung | |
ST-Element | .X_Enable |
Besonderheiten | |
Parametrierung / Wirkungsweise | Der Eilgangoverride ist nur wirksam, wenn diese Funktionalität auch in der Kanalparameterliste eingeschaltet wird, ansonsten wird zwischen Vorschub- und Eilgangsätzen nicht unterschieden! Einstellmöglichkeiten über den Kanalparameter P-CHAN-00181:
|
Beschleunigungsoverride | |
Beschreibung | Durch den Beschleunigungsoverride kann die aktive Bahnbeschleunigung mit einem zusätzlichen Faktor gewichtet werden. Wenn erforderlich wird die Bahnbeschleunigung in dynamischen Bewegungsphasen auf den Nennnwert gesetzt. Bei aktivem Feedhold wird der Overridewert ignoriert. Die Schnittstelle ist nur wirksam, wenn der Kanalparameter |
| MCControlUNS16Unit, s. Beschreibung Control Unit |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS16Unit_OverrideAcceleration |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .D_Command .D_Request .D_State |
Einheit | 0.1 % |
Datentyp | UINT |
Wertebereich | [50, 1000] |
Umleitung | |
ST-Element | .X_Enable |
Sollwertausgabe auf reale Achsen unterbrechen | |
Beschreibung | Hierdurch wird die Ausgabe von Sollwerten des NC-Kanals auf die physikalischen Achsen unterbrochen. Der NC-Kanal wird angehalten und die Zuordnung zu den realen Achsen wird aufgehoben. Die physikalischen Achsen können danach durch einen anderen Kanal angefordert und verfahren werden. Hierbei kann eine unterschiedliche logische Achse der physikalischen Achse zugeordnet werden. Nach Aufheben dieser Unterbrechung können die Achsen wieder angefordert werden und der ursprüngliche Kanal fährt mit seiner Bewegung fort. |
| MCControlBoolUnit, s. BeschreibungControl Unit |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_SuspendAxisOutput |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request .X_State |
Datentyp | BOOL |
Wertebereich | [TRUE - , FALSE] |
Umleitung | |
ST-Element | .X_Enable |
Externe Vorgabe Bahngeschwindigkeit | |
Beschreibung | Externe Vorgabe der Bahngeschwindigkeit. Die Aktivierung der eingestellten Bahngeschwindigkeit erfolgt mit der Control Unit MCControlBoolUnit_ExtCommandSpeedValid. |
| MCControlUNS32Unit, s. BeschreibungControl Unit |
Besonderheiten | Die in dieser Schnittstelle übergebene Bahngeschwindigkeit wird automatisch auf die in den Achsparametern eingestellten Grenzwerte begrenzt. |
Einheit | 1μm/s |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS32Unit_ExtCommandSpeed |
Kommandierter und angeforderter Wert | |
ST-Element | .D_Command .D_Request |
Datentyp | UDINT |
Rückgabewert | |
ST-Element | .D_State |
Datentyp | UDINT |
Besonderheiten | In D_State wird die tatsächlich im Interpolator verwendete Bahngeschwindigkeit angezeigt, inclusive einer eventuellen Beeinflussung durch den Override. |
Umleitung | |
ST-Element | .X_Enable |
Aktivierung externe Bahngeschwindigkeit | |
Beschreibung | Aktivierung der in der Control Unit MCControlUNS32Unit_ExtCommandSpeed kommandierten Geschwindigkeit. Zur Erreichung der kommandierten Geschwindigkeit werden die an der Bewegung beteiligten Achsen beschleunigt oder verzögert. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_ExtCommandSpeedValid |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | . X_Command .X_Request .X_State |
Datentyp | BOOL |
Wertebereich | [TRUE, FALSE] |
Umleitung | |
ST-Element | .X_Enable |
Einlesesperre Interpolator | |
Beschreibung | Sperren des Einlesens von Sätzen im Interpolator. Bei Aktivierung der Control Unit stoppt der Interpolator nachdem er die bereits eingelesenen Sätze abgearbeitet hat. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_InputDisable |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | . X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE, FALSE] |
Umleitung | |
ST-Element | . X_Enable |
OTC Radius Offset | |
Beschreibung | Durch Setzen dieses Verschleißoffsets kann der Werkzeugradius entsprechend dem Verschleiß angepasst werden. Einheit: 0.1µm |
| MCControlSGN32Unit, s. Beschreibung Control Unit |
Besonderheiten | Der Verschleißoffset wird in der CNC nicht in einem Takt ausgegeben, sondern er wird über mehrere Takte ausgefahren. |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlSGN32Unit_OTCRadiusOffset |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | DINT |
Wertebereich | [-P-TOOL-00031, P-TOOL-00031] |
Umleitung | |
ST-Element | . X_Enable |
Reduzierte Geschwindigkeit, Kanal | |
Beschreibung | Durch setzen dieses Signals wird die Bahngeschwindigkeit auf die in den Achsparametern P-AXIS-00214 bzw. P-AXIS-00155 defiinierten Werte reduziert. Siehe auch [Achsparameter]. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten | Es werden die Grenzwerte der an der Bewegung beteiligten Achsen berücksichtigt. Der wirksame Wert für die reduzierte Geschwindigkeit wird so ermittelt, dass keine er an der Bewegung beteiligten Achsen ihren konfigurierten Grenzwert überschreitet. |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_ReducedFeed |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Reduzierte Geschwindigkeit aktiv, Reduzierte Geschwindigkeit nicht aktiv] |
Umleitung | |
ST-Element | . X_Enable |
Reduzierte Geschwindigkeit in Zone 1, Kanal | |
Beschreibung | Durch setzen dieses Signals wird die Bahngeschwindigkeit auf die im Achsparameter P-AXIS-00030 definierte Geschwindigkeit begrenzt wenn sich die Achse innerhalb des durch die Parameter P-AXIS-00085 und P-AXIS-00093 definierten Bereiches befindet. Falls notwendig erfolgt eine Verzögerung der Achse nach eintreten in den Bereich. Siehe auch [Achsparameter]. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_ReducedFeedZone |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Reduzierte Geschwindigkeit für Zone 1 aktiv, Reduzierte Geschwindigkeit für Zone 1 nicht aktiv] |
Umleitung | |
ST-Element | . X_Enable |
Reduzierte Geschwindigkeit in Zone 2, Kanal | |
Beschreibung | Durch Setzen dieses Signals wird die Bahngeschwindigkeit auf die im Achsparameter P-AXIS-00030 definierte Geschwindigkeit begrenzt wenn sich die Achse innerhalb des durch die Parameter P-AXIS-00097 und P-AXIS-00105 definierten Bereiches befindet. Falls notwendig erfolgt eine Verzögerung der Achse nach eintreten in den Bereich. Siehe auch [Achsparameter]. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_ReducedFeedZone2 |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Reduzierte Geschwindigkeit für Zone 2 aktiv, Reduzierte Geschwindigkeit für Zone 2 nicht aktiv] |
Umleitung | |
ST-Element | . X_Enable |
Zeitoverride gültig | |
Beschreibung | Zeitoverride ist aktiviert. |
| MCControlBoolUnit, s. Beschreibung Control Unit |
Besonderheiten |
|
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_OverrideTimeValid |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .X_Command .X_Request . X_State |
Datentyp | BOOL |
Wertebereich | [TRUE = Zeitoverride ist aktiviert, Zeitoverride ist nicht aktiviert] |
Umleitung | |
ST-Element | . X_Enable |
Hinweis | |
Durch den Zeitoverride wird neben dem Bahnvorschub die Beschleunigung unabhängig von Echtzeitfunktionen wie Feedhold oder Sicherheitsfunktionen wie Reduced Speed gewichtet. Dies hat der Anwender bei der Nutzung dieser Funktion zu berücksichtigen |
Zeitoverride | |
Beschreibung | Durch den Zeitoverride kann die CNC-interne Zeitbasis für Bewegungen beeinflusst werden. Die Wirkung entspricht einer Zeitlupenfunktion. Dabei wirkt sich der Zeitoverride unterschiedlich auf die Bahngeschwindigkeit und -beschleunigung aus. |
| MCControlUNS16Unit, s. Beschreibung Control Unit |
Besonderheiten | Über den Kanalparameter P-CHAN-00111 kann der Anwender die Wirkungsweise des Zeitoverride auch auf die Funktionalität Verweilzeit wirken lassen. Siehe [Kanalparameter].see "Extracted nested table 10" |
Zugriff | PLC liest Request + State und schreibt Command + Enable |
ST-Pfad | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS16Unit_OverrideTime |
Kommandierter, angeforderter und Rückgabewert | |
ST-Element | .D_Command .D_Request .D_S tate |
Einheit | 0.1 % |
Datentyp | UINT |
Wertebereich | [100, 1000] |
Umleitung | |
ST-Element | .X_E nable |