Auswahl der Betriebsart
Mit der Auswahl der Betriebsart bestimmen Sie die Regelgröße und die Reglerstruktur. Wählen Sie Betriebsart und Prozessdaten entsprechend der gewünschten Regelgröße:
Regelgröße | Betriebsart über CoE-Online Index 0x7010:03 „Modes of operation“ | Predefined PDO über Prozessdaten |
|---|---|---|
Position 1) | CSP | Predefined PDO „Position“ |
Geschwindigkeit | CSV | Predefined PDO „Velocity“: |
Drehmoment | CST | Predefined PDO „Torque“: |
Drehmoment u. | CSTCA | Predefined PDO „Torque“ + PDO 0x1603 „DRV Commutation angle“ |
Drive Motion Control | DMC | 64-Bit-Steuerung: 32-Bit-Steuerung |
1) Sie können die Position auch mit der Betriebsart CSV regeln. Siehe Kapitel CSV (Geschwindigkeitsregelung). Die Regelung mit CSP ist aber performanter. | ||
Einstellung der Betriebsart über das CoE-Verzeichnis
Gehen Sie wie folgt vor, um die gewählte Betriebsart einzustellen:
Hinweis | |
Beschädigung des Gerätes möglich! Es wird dringend davon abgeraten, die Einstellungen in den CoE-Objekten zu ändern während die Achse aktiv ist, da die Regelung beeinträchtigt werden könnte. |
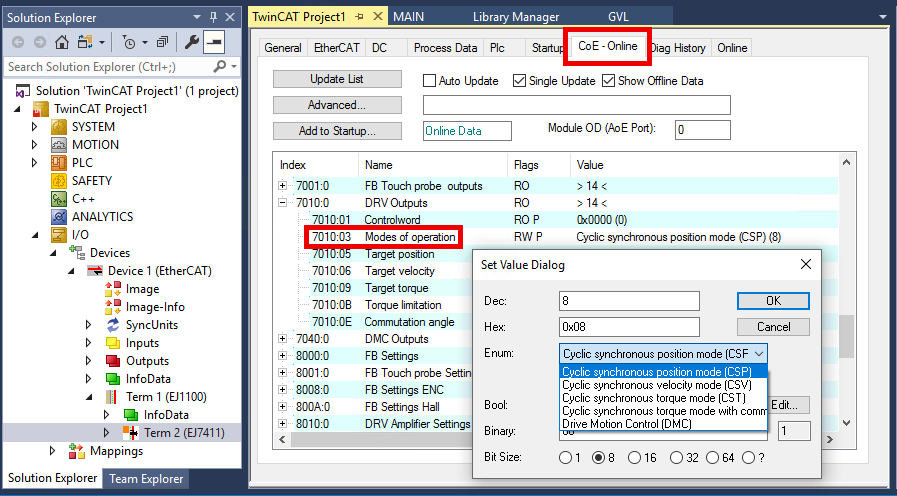
- 1. Den Karteireiter „CoE - Online“ anklicken.
- 2. In Parameter 0x7010:03 „Modes of operation“ die Betriebsart einstellen.
Hinweis | |
Veränderungen im CoE-Verzeichnis (CAN over EtherCAT), Programmzugriff Beachten Sie bei Verwendung/Manipulation der CoE-Parameter die allgemeinen CoE-Hinweise im Kapitel „CoE-Interface“ der EtherCAT-System-Dokumentation:
|
Auswahl der Prozessdaten über das Predefined PDO Assignment
- 1. Den Karteireiter „Process Data“ anklicken.
- 2. „Predefined PDO Assignment“ anklicken.
- 3. Wählen Sie den richtigen Eintrag gemäß der folgenden Tabelle.
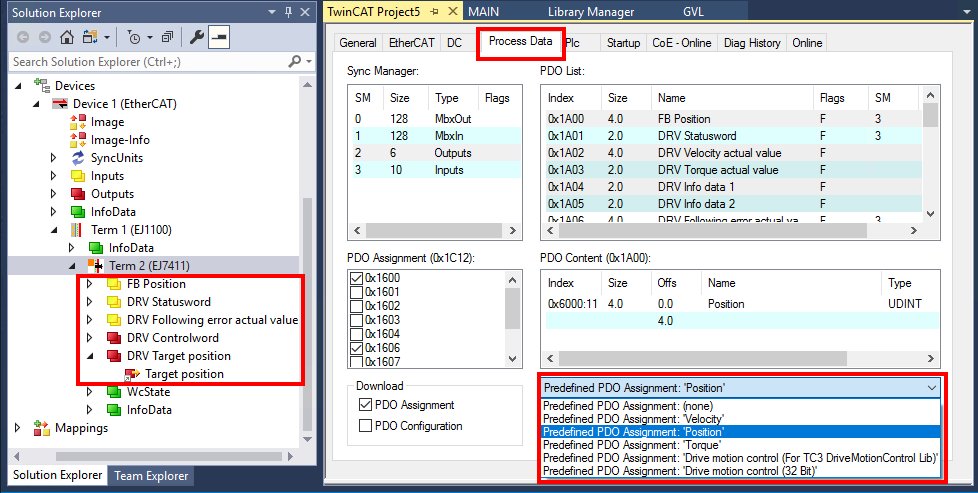
- Die gewählten Prozessdaten werden in der Baumstruktur angezeigt.
Betriebsart | „Predefined PDO Assignment“ | ||
|---|---|---|---|
Name | Inputs (SM3) | Outputs (SM2) | |
„Position“: | 0x1A00 „FB Position“ | 0x1600 „DRV Controlword“ | |
„Velocity“: | 0x1A00 „FB Position“ | 0x1600 „DRV Controlword“ | |
„Torque“: | 0x1A00 „FB Position“ | 0x1600 „DRV Controlword“ | |
„Torque“ | |||
“Drive motion control (For TC3 DrivemMotionControl)” | 0x1A40 „DMC Inputs“ | 0x1640 „DMC Outputs“ | |
“Drive motion control (32 Bit)” | 0x1A41 „DMC Inputs 32 Bit“ | 0x1641 „DMC Outputs 32 Bit“ | |