Inbetriebnahme mit einer 64-Bit-Steuerung
Mit den folgenden Schritten konfigurieren Sie TwinCAT für den Betrieb des EtherCAT-Steckmoduls EJ7411 mit Drive Motion Control.
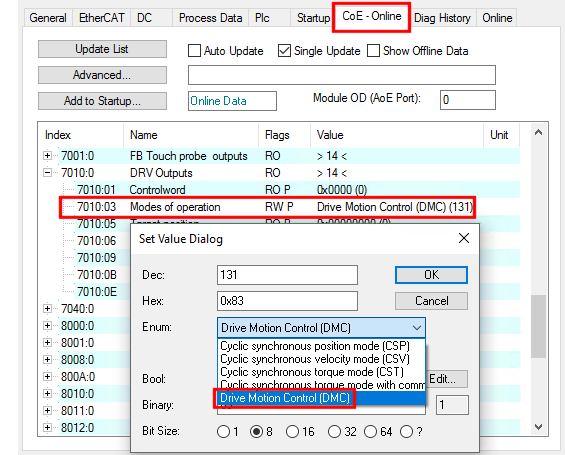
- 1. Im CoE-Parameter 0x7010:03 „Modes of operation“ die Betriebsart „Drive Motion Control (DMC)“ einstellen.
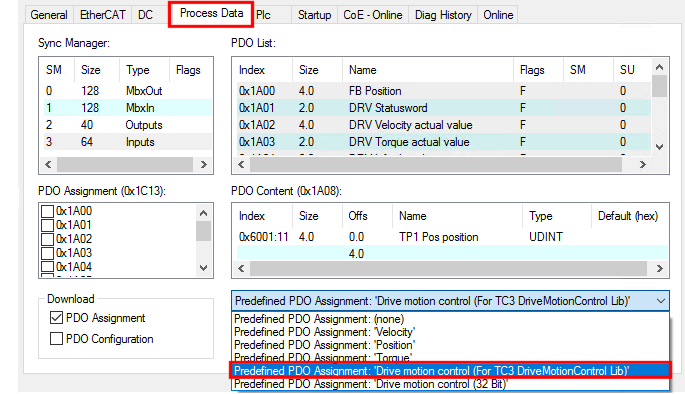
- 2. Das Predefined PDO Assignment „Drive motion control (For TC3 DriveMotionControl Lib)“ aktivieren.
- Die Prozessdaten für die Verwendung von Drive Motion Control sind aktiviert.
- 3. Ein SPS-Projekt anlegen, falls noch keins angelegt wurde.
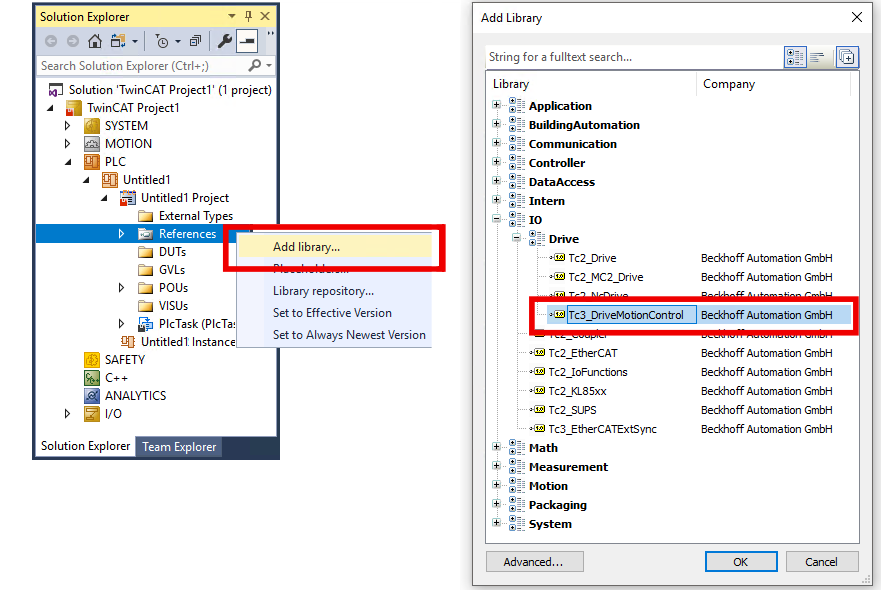
- 4. Die Bibliothek „Tc3_DriveMotionControl“ zu dem SPS-Projekt hinzufügen.
(Falls Sie Drive Motion Control ohne die Bibliothek „Tc3_DriveMotionControl“ verwenden wollen, siehe Kapitel State-Machine.) - 5. Falls im aktuellen Projekt die Bibliotheken „Tc3_DriveMotionControl“ und „Tc2_Mc2“ gleichzeitig verwendet werden:
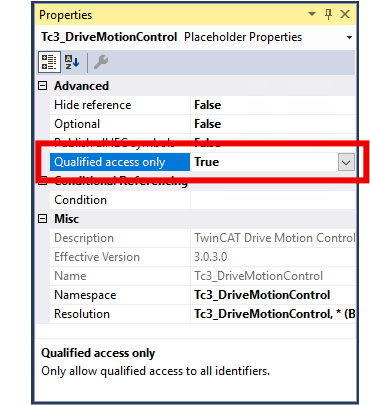
Im Fenster „Properties“ von einer der beiden Bibliotheken die Eigenschaft „Qualified access only“ auf „True“ setzen. - Die Bibliothek mit „Qualified access only“ kann im SPS-Code nur noch über den entsprechenden Namespace angesprochen werden, z. B.:
Tc3_DriveMotionControl.MC_Stop()
Dadurch werden Namenskonflikte vermieden, z. B. beim Aufrufen des FunktionsbausteinsMC_Stop, der in beiden Bibliotheken den gleichen Namen hat. - 6. In der SPS eine Variable vom Typ „AXIS_REF“ deklarieren. Beispiel:
VAR
DmcAxis: AXIS_REF;
END_VAR- 7. In der Menüleiste „Build“ > „Build Solution“ anklicken.
- Das Projekt wird kompiliert und das Prozessabbild der SPS-Task erzeugt.
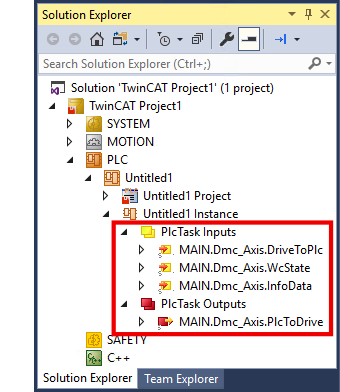
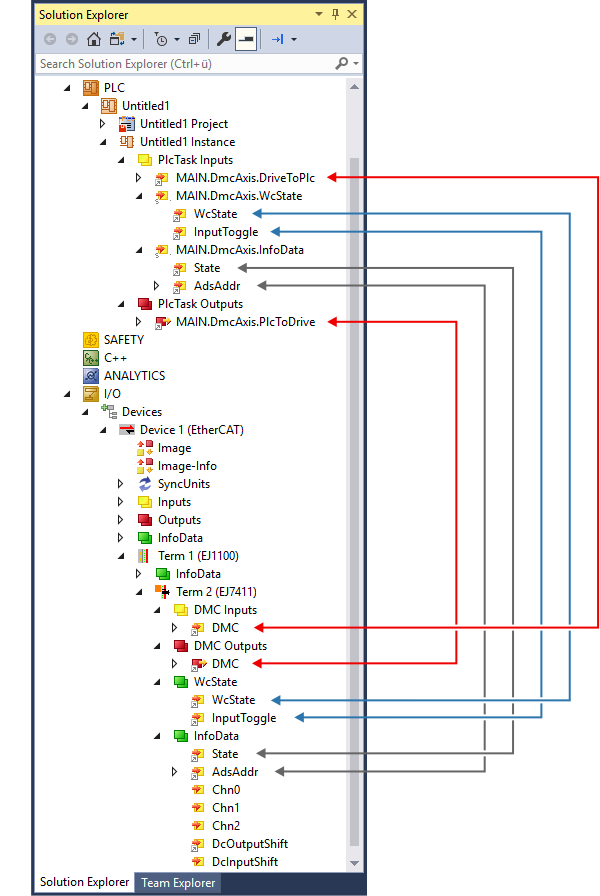
- 8. Im Solution Explorer die SPS-Variablen mit den Prozessdaten von EJ7411 verknüpfen.
- 9. Im SPS-Code den Funktionsbaustein
ReadStatus()zyklisch aufrufen, idealerweise zu Beginn jedes SPS-Zyklus (s. Hinweis zum Auffrischen der Status-Datenstruktur in AXIS_REF).
Weiterführende Informationen