CSP (Positionsregelung)
CSP ist die Abkürzung für „Cyclic Synchronous Position“.
- Die Betriebsart CSP ist in 0x7010:03 „Modes of operation“ eingestellt wie in „Einstellung der Betriebsart“ beschrieben.
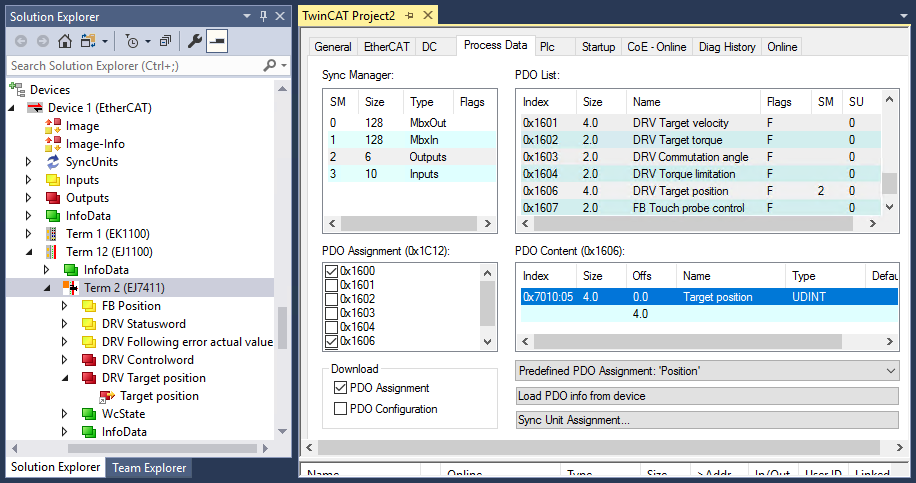
- Das Predefined PDO Assignment „Position“ ist eingestellt, wie in „Auswahl der Prozessdaten“ beschrieben.
- 1. Einstellen der Zielposition
Über das Prozessdatum „Target position“ kann eine definierte Zielposition eingestellt werden.
 | Zykluszeit Für alle Betriebsarten muss die Zykluszeit ein ganzzahliges Vielfaches von 62,5 µs, Bei Nutzung der Fahrwegsteuerung (DMC) darf die Zykluszeit nicht schneller als 250 µs sein. |
Mit den Einstellungen für die Betriebsart CSP rechnet das EtherCAT-Steckmodul intern die Regelkreise für Strom, Geschwindigkeit und Position. Die NC berechnet die Sollwertvorgabe der Position und gibt diese an das Modul weiter.
- 1. Schleppfehlerüberwachung einstellen
Weiterhin besteht im CSP Mode die Möglichkeit, eine Schleppfehlerüberwachung einzuschalten. Im Auslieferungszustand ist die Schleppfehlerüberwachung ausgeschaltet. Bei allen anderen Modes kommt dies nicht zum Einsatz und wird ignoriert.
Gehen Sie wie folgt vor, um die Schleppfehlerüberwachung einzustellen:
Hinweis | |
Beschädigung des Gerätes möglich! Es wird dringend davon abgeraten, die Einstellungen in den CoE-Objekten zu ändern während die Achse aktiv ist, da die Regelung beeinträchtigt werden könnte. |
Klicken Sie den Karteireiter „CoE-Online“ an
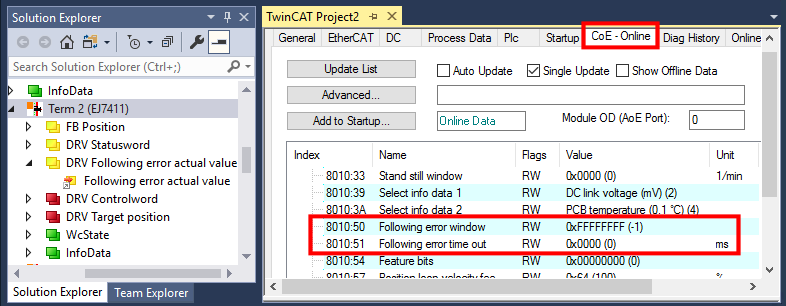
- 1. Stellen Sie mit dem Following error window (Index 0x8010:50) das Fenster der Schleppfehlerüberwachung ein.
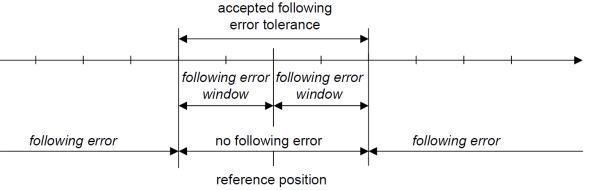
- Der hier eingestellte Wert - mit dem Skalierungsfaktor multipliziert - gibt an, um welche Position die Ist-Position von der Sollposition, positiv und negativ, abweichen darf. Die gesamte akzeptierte Toleranz ist somit doppelt so groß, wie die im Following error window eingetragene Position (siehe Abb. Schleppfehlerfenster).
- Der Wert 0xFFFFFF (-1) im Following error window bedeutet, dass die Schleppfehlerüberwachung ausgeschaltet ist und entspricht dem Auslieferungszustand.
- 2. Stellen Sie mit dem Following error time out (Index 0x8010:51) die Zeit (in ms) ein, die für eine Schleppfehlerüberschreitung erlaubt ist.
- Sobald die Sollposition für die im Following error time out eingetragene Zeit um mehr als die im Following error window eingetragene Position überschritten wird, gibt das Modul einen Fehler aus und bleibt unverzüglich stehen.
Der Following error time out ist im Auslieferungszustand 0x0000 (0).
- Der aktuelle Schleppfehler kann über das Prozessdatum Following error actual value ausgelesen werden.
Hinweis | |
Veränderungen im CoE-Verzeichnis (CAN over EtherCAT), Programmzugriff Beachten Sie bei Verwendung/Manipulation der CoE-Parameter die allgemeinen CoE-Hinweise im Kapitel „CoE-Interface“ der EtherCAT-System-Dokumentation:
|
Beispiel Fahrauftrag mit Schleppfehlerüberwachung
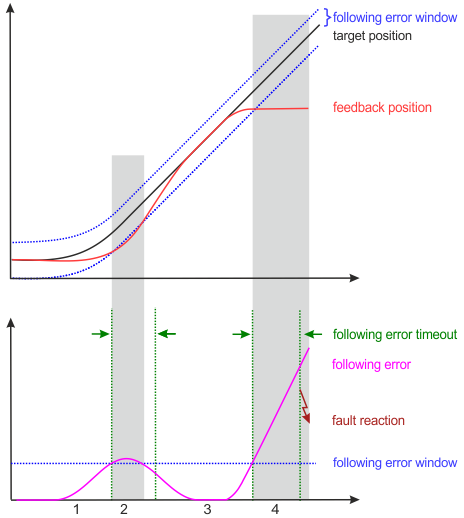
- 1. Beim Beschleunigen wächst der Schleppabstand (following error).
- 2. Der eingestellte Grenzwert für den Schleppfehler (following error window) wird überschritten.
Die Dauer der Überschreitung des following error window (in obenstehender Abbildung grau hinterlegt) ist kürzer als der in following error timeout vorgegebene Zeitraum (in obenstehender Abbildung grün dargestellt). - Es wird kein Fehler ausgelöst.
- 3. Der Schleppabstand sinkt bis auf null, sobald die Zielposition (target position) erreicht ist.
Bei einer Blockade der Achse (z. B. bei Endanschlag) läuft target position weiter, während feedback position stehen bleibt. - Der Schleppabstand wächst.
- 4. Der Schleppabstand überschreitet den Grenzwert Following error window für einen längeren Zeitraum als in following error timeout vorgegeben.
- Nach Ablauf von following error timeout wird ein Fehler ausgelöst (fault reaction).