Inbetriebnahme mit einer 32-Bit-Steuerung
 | Die Bibliothek „Tc3_DriveMotionControl“ kann nicht verwendet werden. Sie können Fahraufträge nur ausführen, indem Sie die State-Machine manuell durchlaufen. Siehe Kapitel State-Machine. |
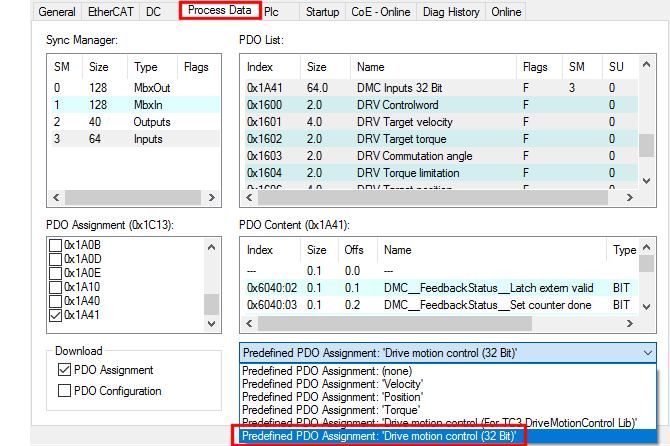
Da das Modul in der Werkseinstellung 64-Bit Prozessdaten bereitstellt, dies aber von einigen Steuerungen nicht verarbeitet werden kann, gibt es alternativ auch die Möglichkeit, das Prozessabbild mit 32 Bit zu mappen. Dies lässt sich über das Predefined PDO Assignment „Drive motion control (32 Bit)“ einstellen.
(Um die Inputs und Outputs manuell zu mappen, nutzen Sie die Indizes 0x1641 und 0x1A41. Siehe Kapitel Prozessdaten).
Alle positionsbezogenen Prozessdaten sind bei diesem Predefined PDO Assignment 32 Bit groß anstatt 64 Bit. Die 32 Bit teilen sich in 20 Bit Singleturn und 12 Bit Multiturn Umdrehungen auf, unabhängig von der Auflösung des Feedback.
Das EtherCAT-Steckmodul rechnet intern trotzdem weiterhin mit 64 Bit Daten. Deshalb muss z. B. 0x8040:08 „Calibration Position“ weiterhin in 32 Bit Singleturn und 32 Bit Multiturn angegeben werden, anstatt in 20 Bit Singleturn und 12 Bit Multiturn.
Beachten Sie, dass das Steckmodul EJ7411 nur Inkrementalencoder und keine Absolutwertgeber unterstützt. Daher bleiben die Positionsdaten über einen Powercycle hinaus nicht erhalten.
Alle nicht positionsbezogenen Prozessdaten bleiben in der Größe unverändert. Die Adressoffsets der einzelnen Prozessdaten sind identisch und an den entsprechenden Stellen sind Füll-Bytes eingefügt.
Die geschwindigkeitsbezogenen Prozessdaten sind in 10.000stel des Parameters 0x8011:1B „Motor speed limitation“ skaliert.
Die Prozessdaten für die Beschleunigung und Verzögerung geben in ms an, wie schnell der Motor auf die in 0x8011:1B „Motor speed limitation“ angegebene Geschwindigkeit beschleunigen bzw. von der Geschwindigkeit in den Stillstand verzögern soll. Bei einem Wert von 2000 für die Beschleunigung würde der Motor zum Erreichen der Geschwindigkeit 2 s benötigen.
Konfiguration
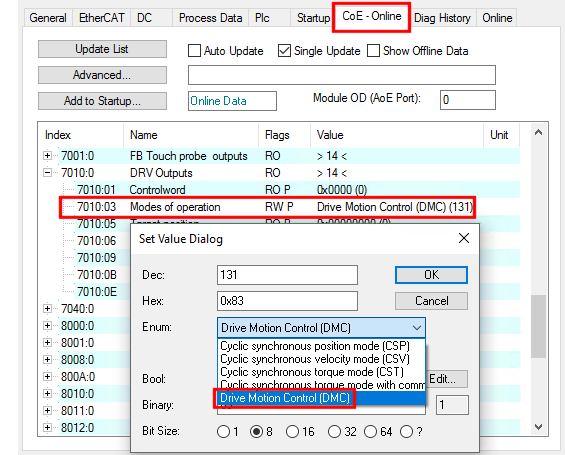
- 1. Im CoE-Parameter 0x7010:03 „Modes of operation“ die Betriebsart „Drive Motion Control (DMC)“ einstellen.
- 2. Das Predefined PDO Assignment „Drive motion control (32 Bit)“ aktivieren.
- Die Prozessdaten für die Verwendung von Drive Motion Control sind aktiviert.
CoE-Parameter
Die CoE-Parameter zur Konfiguration von Drive Motion Control befinden sich in den folgenden CoE-Objekten: