Statically controlled core functions
The command that is accepted by these core functions is usually called bEnable.
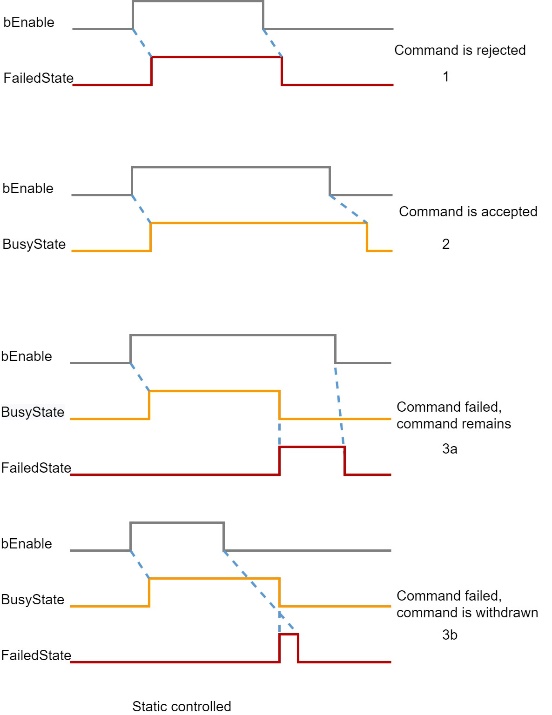
The rising edge of bEnable triggers a series of checks to determine whether the execution conditions are met. If the execution conditions are not met, the command is rejected and the core function enters the FailedState (case 1 in the figure below). If the execution conditions are met, the command is accepted and the core function enters BusyState. The falling edge of bEnable triggers a response to terminate execution (case 2 below).
If an error occurs during the execution of the command, the core function enters the FailedState (case 3 below). At this time it is checked if bEnable is still TRUE and the state of the core function is changed in the next PLC cycle.
The following core functions are statically controlled:
Corefunction | Description |
|---|---|
Is used to activate setpoint generation that is controlled by a guide value. | |
Is used internally for setpoint generation by TwinCAT 3 Plastic Technology Functions. | |
Is used to command a movement without a specified target. | |
Reserved for future extension. | |
Is used to activate a movement without a specified target and a velocity that is controlled by a guide value. | |
A special core function for hydraulic axes. It is used to identify the characteristic velocity behavior of the axis. | |
A special core function for hydraulic axes. It is used to send output signals directly to the control device. | |
A special core function for transforming axes. It is used for coupling the two internal axes of a transforming axis. |
Timing Diagram
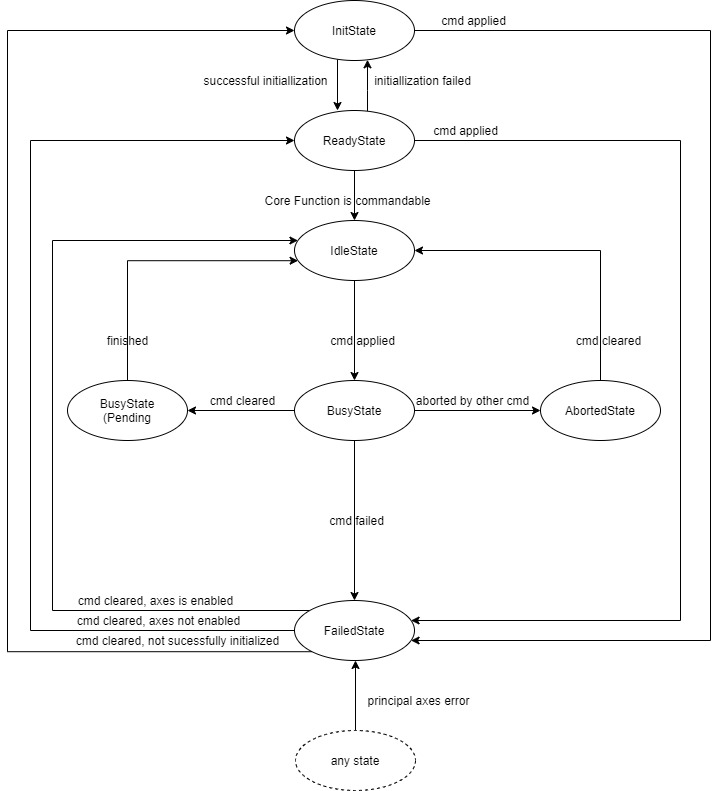
State machine