F_VN_FindContourHierarchyExp

Search for object contours in a binary image and determine their hierarchical relationship. (expert function)
Can use available TwinCAT Job Tasks for executing parallel code regions.
Can return partial results when canceled by Watchdog.
Syntax
Definition:
FUNCTION F_VN_FindContourHierarchyExp : HRESULT
VAR_INPUT
ipSrcImage : ITcVnImage;
ipContours : Reference To ITcVnContainer;
ipHierarchy : Reference To ITcVnContainer;
eRetrievalMode : ETcVnContourRetrievalMode;
eApproximationMethod : ETcVnContourApproximationMethod;
END_VAR
VAR_IN_OUT
aOffset : TcVnPoint;
END_VAR
VAR_INPUT
hrPrev : HRESULT;
END_VAR
 Inputs
Inputs
|
Name |
Type |
Description |
|---|---|---|
|
ipSrcImage |
Source image (1 channel, binary) | |
|
ipContours |
Reference To ITcVnContainer |
Returns a container which is filled with the found contours (ContainerType_Vector_Vector_TcVnPoint2_DINT; The elements of this container are single contours. Non-zero interface pointers are reused.) |
|
ipHierarchy |
Reference To ITcVnContainer |
Returns a container which is filled with information on the found contours' hierarchy (ContainerType_Vector_TcVnVector4_DINT; The elements of this container are four-dimensional vectors containing the 0-based indices of the next [0] and the previous contour [1] at the same level, the first child [2], and the parent [3]. Non-zero interface pointers are reused.) |
|
eRetrievalMode |
Specifies which contours are retrieved and how their relationship is encoded | |
|
eApproximationMethod |
Contour encoding | |
|
hrPrev |
HRESULT indicating the result of previous operations (If SUCCEEDED(hrPrev) equals false, no operation is executed.) |
 Return value
Return valueFurther information
The function F_VN_FindContourHierarchyExp is an extension of the function F_VN_FindContoursExp by the return of the contour hierarchy.
Parameter
Input image
The input image ipSrcImage must have precisely 1 channel and should be a binary image.
If the input is not a binary image, it will be converted internally to one by means of a threshold value of 1. Therefore, the input image should be manually pre-processed with a threshold value or a binary segmentation.
List of contours found (Return value)
All contours found in the input image are returned in the container ipContours. The container is a two-dimensional array of points and therefore has the type ContainerType_Vector_Vector_TcVnPoint2_DINT.
The contours that are found are returned in ipContours. Each contour consists of a sum of points which are combined into a container. Another higher-level container then consolidates all contours.
Hierarchy (Expert, return value)
The parameter ipHierarchy returns the hierarchy of the contours found in a container of the type TcVnVector4_DINT. The vectors of the container have the following elements:
[0] – NEXT - Index of the next contour on the same level[1] – PREVIOUS - Index of the previous contour on the same level[2] – CHILD - Index of the first child contour[3] – PARENT - Index of parent contour
Search mode (Expert)
The search mode eRetrievalMode of the type ETcVnContourRetrievalMode defines which contours are to be sought:
TCVN_CRM_LIST: All contoursTCVN_CRM_EXTERNAL: Only outer contours (as with F_VN_FindContours)TCVN_CRM_CONNECTED_COMPONENTS: Contours with a two-layer hierarchyTCVN_CRM_TREE: All contours; used in interaction with the function F_VN_FindContourHierarchyExp in order to determine the hierarchy of the contoursTCVN_CRM_FLOODFILL: Returns the contours found with the help of a floodfill algorithm (available only for DINT images)
Approximation method (Expert)
The approximation method eApproximationMethod of the type ETcVnContourApproximationMethod specifies whether the contours are to be described on the basis of all surrounding points (TCVN_CAM_NONE) or whether the number of describing points are to be reduced with the help of approximation.
Offset (Expert)
The offset aOffset defines constant X/Y values by which all contour points are shifted. This can be helpful when contours are sought in an ROI and their positions should be referenced to the original image.
Examples of contour hierarchies
Via eRetrievalMode, not only is it possible to specify whether all contours or just the outer contours are to be found, but also how contours are to be sorted and how they are hierarchically related to one another. This can be read from the parameter ipHierarchy:
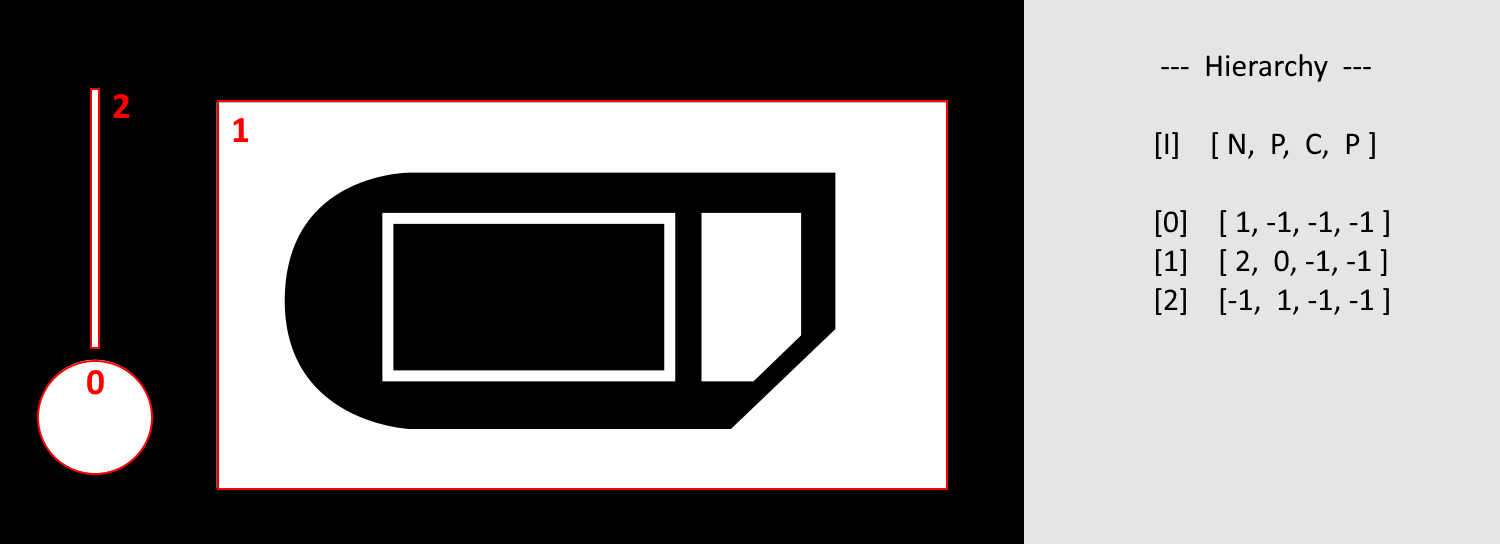
- TCVN_CRM_EXTERNAL
- Only the outer contours are returned as a sorted list. The Child
[2]and Parent[3]relationships are not determined and are invalid with-1.
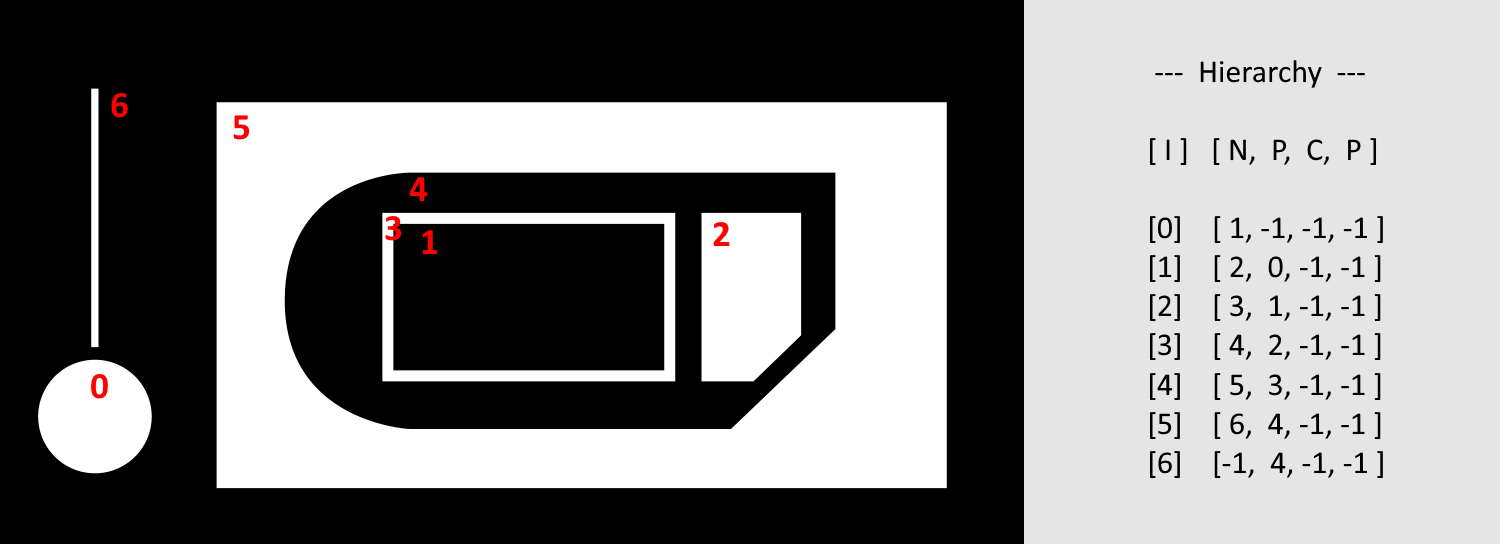
- TCVN_CRM_LIST
- All contours are returned as a sorted list. The Child
[2]and Parent[3]relationships are not determined and are invalid with-1.
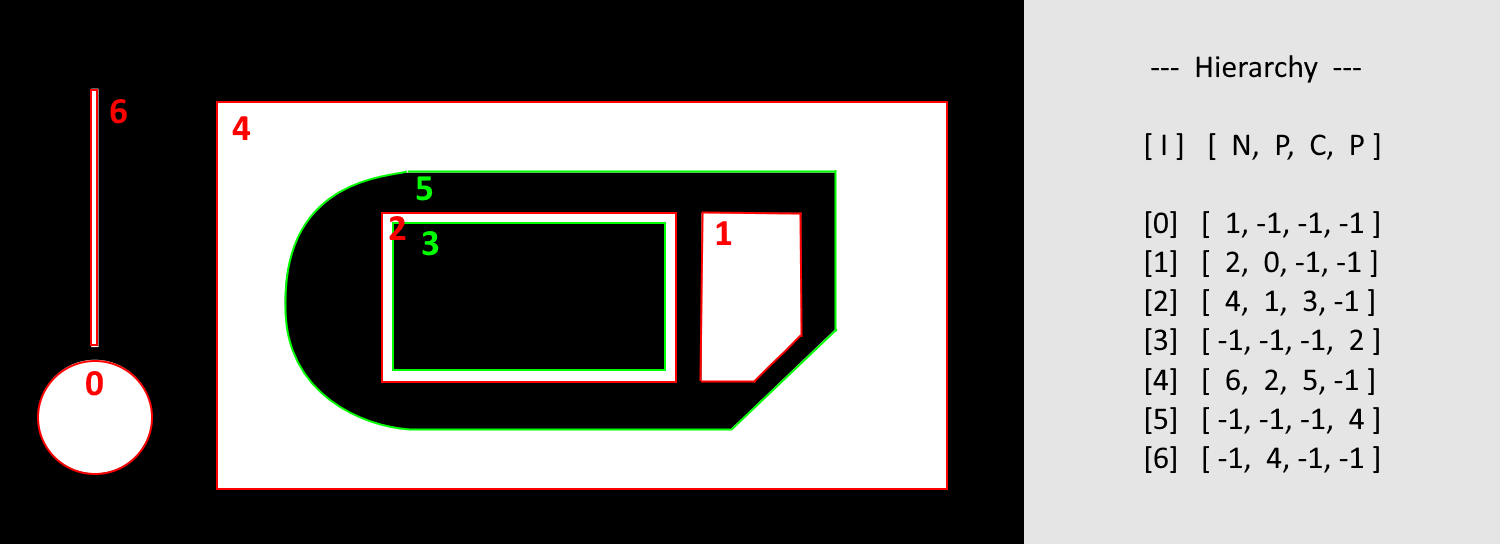
- TCVN_CRM_CONNECTED_COMPONENTS
- All contours are sorted according to a 2-step hierarchy. The outer contours are considered first, then in the second step the contour lying directly within them. If there are further contours within the second step, they are set to the first step like outer contours
- In this sample, this means that the inner Child
[2]contours (green in the image) cannot be Parent[3]contours (red in the image) at the same time. Therefore, contours that would lie in a tree structure at Level 3 are regarded again as outer contours and set to Level 1 (Parent[3] = -1), in this case contours 1 and 2.
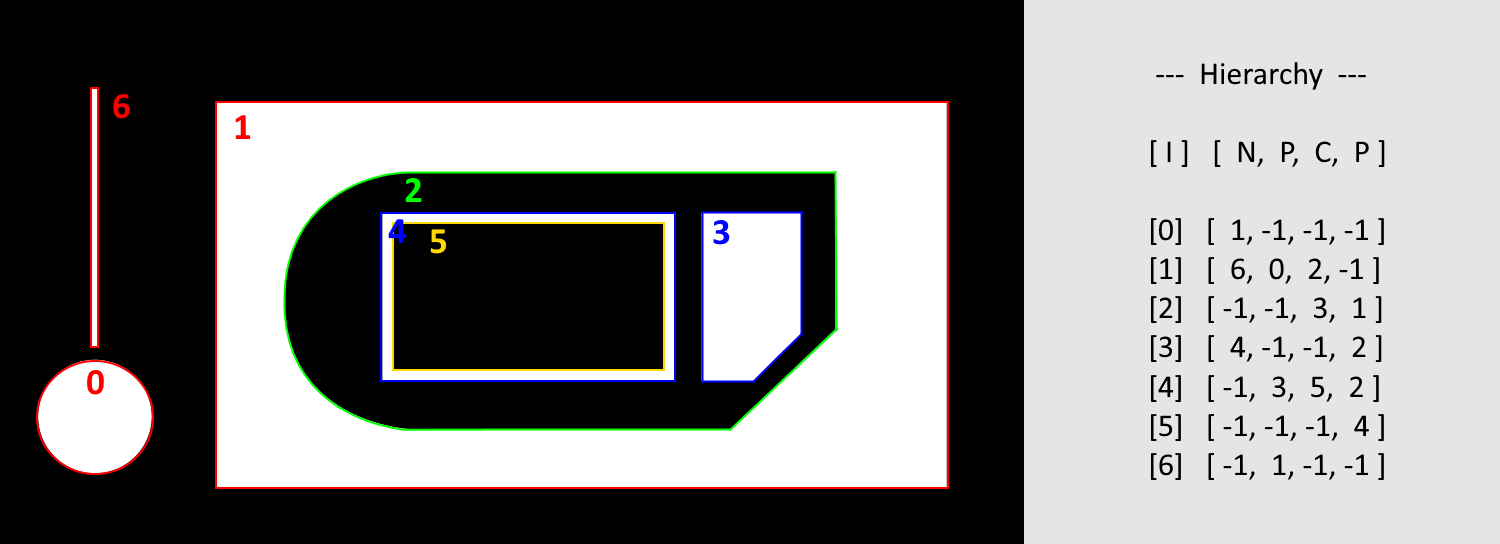
- TCVN_CRM_TREE
- All contours are set according to a tree structure. It is possible for contours to be both Child
[2]and Parent[3]contours, depending on how they are nested within one another.
Samples
- Find Contour - Hierarchy & Retrieval Mode, for the parameter ETcVnContourRetrievalMode
- Find Contour - Approximation Method, for parameter ETcVnContourApproximationMethod
- Find contour instead of Blob Detection, for comparison with function F_VN_DetectBlobs
Related functions
- F_VN_FindContours(Exp) for general contour finding
- F_VN_FindContourHierarchyExp with return of the hierarchy
- F_VN_DetectBlobs with integrated filtering of the contours
Required License
TC3 Vision Base
System Requirements
|
Development environment |
Target platform |
PLC libraries to include |
|---|---|---|
|
TwinCAT V3.1.4024.59 or later |
PC or CX (x64) with min. PL50, e.g. Intel 4-core Atom CPU |
Tc3_Vision |