Tool radius compensation (TRC)
Tool radius compensation (TRC) allows programming of the workpiece contour independently of the geometry of the tool. If TRC is selected (G41, G42), a tool path equidistant from this programmed tool contour is computed at distance "tool radius".
Tool radius compensation acts in the plane selected with G17, G18 or G19. The tool compensation blocks saved in the D-words (see chapter 12: "Tool geometry compensation") are used as tool compensation values.
Selection of a new D-word or writing variable V.G.WZ_AKT.R allows the tool radius to be changed even with TRC active. The change in tool radius is possible only together with a linear block.
When using negative tool radius the side of selection of TRC is changed automatically.
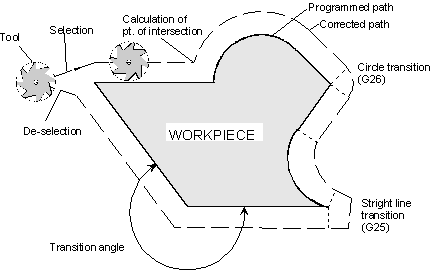 Fig.84: Mechanism and terminology's of tool radius compensation
Fig.84: Mechanism and terminology's of tool radius compensationOverview of all TRC-relevant G-functions:
Selection/ Deselection
G40 TRC-Deselection (modal, Default)
G41 Selection of TRC left of contour (modal)
G42 Selection of TRC right of contour (modal)
Selection/ deselection methods:
G138 Direct selection/ deselection of TRC (modal)
G139 Indirect selection/ deselection of TRC (modal, Default)
G237 Perpendicular selection/ deselection of TRC (modal)
G238 Inner corner selection of TRC (modal)
G239 Direct selection/deselection of TRC without a block (modal)
G05 Tangential selection/ deselection of TRC (non-modal)
Notice | |
During active TRC the change of a modal selection method directly to G238 is not allowed. |
Selection of transitions:
G25 Linear transition (modal, Default)
G26 Circular transition (modal)
Feed adaption:
G10 Constant feed (modal, Default)
G11 Adapted feed (modal)
Contour masking:
G140 Deselection of contour masking (modal, Default)
G141 Selection of contour masking (modal)
Programming examples
Presentation of the different possibilities of selection modes at the use of tool radius compensation. There are shown the commands for direct, indirect, and tangential selection/ deselection of TRC (G139/G138/G05) in combination with the TRC-transition types for linear and circular transition (G25/G26).
The test programs are executed with a tool radius of 10 mm.
Example 1 | G138 | G139 | G05 |
G25 | Path 1 | Path 2 | Path 3 |
%WZKG25 (Contour for G25)
N10 G00 G90 T1 D1 X0 Y0 Z0 G17
(Presentation of contour)
N15 G01 X20 Y20 F1000
N20 G91
N25 G1 X10
N30 X5 Y-5
N35 Y-5
N40 X-5 Y-3
N45 G01 G90 X0 Y0 F1000
(Path 1)
N100 G138 G41 (Direct selection and TRC left of contour)
N105 G01 X20 Y20 F1000 (Compensation movement after G41)
N110 G25 (G25 linear transition)
N115 G1 G91 X10
N120 X5 Y-5
N125 Y-5
N130 X-5 Y-3
N135 G138 G40 (Direct deselection and TRC-off)
N140 G01 G90 X0 Y0 F1000 (Compensation movement after G40)
(Path 2)
N200 G139 G41 (Indirect selection and TRC left of contour)
N205 G01 X20 Y20 F1000 (Compensation movement after G41)
N210 G25 (G25 linear transition)
N215 G1 G91 X10
N220 X5 Y-5
N225 Y-5
N230 X-5 Y-3
N235 G139 G40 (Indirect deselection and TRC-off)
N240 G01 G90 X0 Y0 F1000 (Compensation movement after G40)
(Path 3)
N300 G05 G41 (Tangential selection and TRC left of contour)
N305 G01 X20 Y20 F1000 (Compensation movement after G41)
N310 G25 (G25 linear transition)
N315 G1 G91X10
N320X5 Y-5
N325 Y-5
N330 X-5 Y-3
N335 G05 G40 (Tangential deselection and TRC-off)
N340 G01 X20 Y20 F1000 (Compensation movement after G41)
N999 M30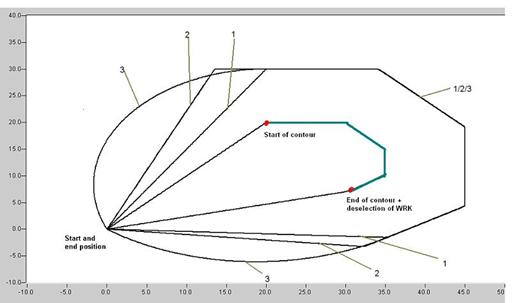
Example 2 | G138 | G139 | G05 |
G26 | Path 4 | Path 5 | Path 6 |
%WZKG26 (Contour for G26)
N10 G00 G90 T1 D1 X0 Y0 Z0 G17
(Presentation of contour)
N15 G01 X20 Y20 F1000
N20 G91
N25 G1 X10
N30 X5 Y-5
N35 Y-5
N40 X-5 Y-3
N45 G01 G90 X0 Y0 F1000
(Path 4)
N400 G138 G41 (Direct selection and TRC left of contour)
N405 G01 X20 Y20 F1000 (Compensation movement after G41)
N410 G26 (G26 circular transition)
N415 G1 G91 X10
N420 X5 Y-5
N425 Y-5
N430 X-5 Y-3
N435 G138 G40 (Direct deselection and TRC-off)
N440 G01 G90 X0 Y0 F1000 (Compensation movement after G40)
(Path 5)
N500 G139 G41 (Indirect selection and TRC left of contour)
N505 G01 X20 Y20 F1000 (Compensation movement after G41)
N510 G26 (G26 circular transition)
N515 G1 G91 X10
N520 X5 Y-5
N525 Y-5
N530 X-5 Y-3
N535 G139 G40 (Indirect deselection and TRC-off)
N540 G01 G90 X0 Y0 F1000 (Compensation movement after G40)
(Path 6)
N600 G05 G41 (Tangential selection and TRC left of contour)
N605 G01 X20 Y20 F1000 (Compensation movement after G41)
N610 G26 (G26 circular transition)
N615 G1 G91X10
N620 X5 Y-5
N625 Y-5
N630 X-5 Y-3
N635 G05 G40 (Tangential deselection and TRC-off)
N640 G01 X20 Y20 F1000 (Compensation movement after G41)
N999 M30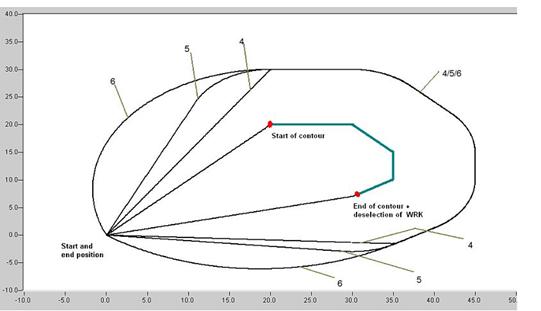
Change of tool data:
Programming example
:
N30 G0 D0 X0 Y0 Z0 G17 (X-Y-Plane)
N40 G0 D100 X10 Y10 (Selection of TLC)
N50 G1 Z0
N60 G0 Z100
N70 G41 (Selection of TRC with data block D100)
N80 G1 Z0
N90 G2 X10 Y10 I-15 (Full circle with radius 15)
N100 G0 Z100
N110 D2 Z200 (Other compensation data block, i.e.)
(other values for TLC and TRC)
N120 G1 Z0 (Here compensatory movement of TLC occurs)
N130 G1 X20 Y20 (Compensatory movement of TRC)
N140 G02 X10 Y10 I-15 (The TRC is now executed with the data block)
N150 G0 Z100
N160 G40 (Deselection of TRC)
N170 X0
:Dynamic change of tool radius:
Another possibility to alter the tool radius is provided by the assignment through variables (see also chapter 0). By this means, for instance, the wear and tear of grinding tools could be compensated during the traverse blocks.
Programming example
N00 G1 G90 X0 D6 F5
N10 G41 G26 (Selection of TRC)
N20 X0 Y250 (Starting point)
N30 V.P.VERSCHLEISS = 0.010
N100 $FOR V.P.LAUF = 0,100,10 (Grinding cycle)
N110 X300
N120 Y200
N130 X0
N140 Y250 (Tool radius is always getting smaller)
N150 V.G.WZ_AKT.R = V.G.WZ_AKT.R - V.P.VERSCHLEISS
N160 $ENDFOR
N200 G40 X300 (De-selection of TRC)
N999 M30 - Direct/ indirect selection (G41/G42) of TRC
- Perpendicular selection and deselection (G237) of TRC
- Inner corner selection(G238)of TRC
- Direct selection/deselection (G239) of TRC without a block
- Generation of compensation blocks
- Behavior during contour change
- Departing blocks at deselection of TRC
- Selection and deselection of TRC in tangential mode
- Limits of TRC
- Programmable additional options