Control commands of a channel
Skip mode, NC block | |
Description | Activates/deactivates Skip mode at interpreter level for the NC program. The status of Skip mode is evaluated only at the start of the NC program. Switchover during execution of an NC program has no effect. |
| MCControlBoolUnit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_ProgramBlockIgnore |
Commanded, requested and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Skip mode NC block ON, FALSE = Skip mode NC block OFF, FALSE] |
Redirection | |
ST element | . X_Enable |
 Data type
Data typeSingle-Block mode at interpreter level NC block | |
Description | Activate/deactivate Single-Block mode at interpreter level. A restart must be present for each block |
| MCControlBoolUnit, see description Control Unit |
Characteristics | Is currently not yet supported |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_SingleBlock |
Commanded, requested and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Single-Block mode ON, FALSE] |
Redirection | |
ST element | . X_Enable |
Enable processing next NC block | |
Description | Enable for processing the next NC block. This element serves to synchronise the geometry chain with the PLC. For this purpose, the PLC blocks the Single-Block step enable and thus stops the interpreter. |
| MCControlBoolUnit, see description Control Unit |
Characteristics | Is currently not yet supported. |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_ContinueMachining |
Commanded, requested and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE, FALSE] |
Redirection | |
ST element | . X_Enable |
Continuation, NC program decoding | |
Description | Continues decoding an NC program after an error has occurred if syntax check (Simulation mode) and interactive step enabling of decoding is activated (decoder parameter, characteristic parameter: syn_chk.interaktiv = 1). |
| MCControlBoolUnit, see description Control Unit |
Characteristics | Is currently not yet supported. |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_ReleaseStop |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE, FALSE] |
Redirection | |
ST element | . X_Enable |
Stop NC program decoding | |
Description | Stop decoding of an NC program if interactive enabling of further processing of the NC program has been activated in Syntax Check Simulation mode. |
| MCControlBoolUnit, see description Control Unit |
Characteristics | Is currently not yet supported. |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlBoolUnit_DecStop |
Commanded, requested and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE, FALSE] |
Redirection | |
ST element | . X_Enable |
Channel operating mode | |
Description | Selection of a specific Channel operating mode, such as Syntax Check or Production Time Computation |
| MCControlSGN32Unit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path. | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlSGN32Unit_ExecutionMode |
Commanded, requested, and return value | |
ST element | .D_Command .D_Request .D_State |
Data type | DINT |
Value range | 0x0000 ISG_STANDARD Normal mode 0x0001 SV Block search 0x0002 SOLLKON Offline Simulation with output of setpoint data 0x0802 SOLLKON Offline Simulation without output of setpoint data 0x0004 ON_LINE Simulation online visualisation 0x0008 SYNCHK Simulation syntax check 0x0010 PROD_TIME Simulation production time computation 0x0020 ONLINE_PROD_TIME Simulation online 0x0040 MACHINE_LOCK Dry run without axis movement 0x0080 TECHNO_FILTER Dry run TECHNO filter 0x0100 KIN_TRAFO_OFF Overwrites automatic enabling kinematic transformations by a characteristic parameter defined in SDA_MDS (sda_mds*.lis). |
Redirection | |
ST element | . X_Enable |
Index of the position offset group | |
Description | A position offset defines an additional offset allowing, for instance, differing clamping positions of a workpiece in the working area of a machine to be taken into consideration. Position offsets are defined in the position of offset data. The position offsets for each axis are specified within a position offset group. Selection of a position offset group is performed based on the index of the group. The data of the position offsets is evaluated by the CNC at the start of the program. |
| MCControlSGN16Unit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlDecoder_Data.MCControlSGN16Unit_ClampPosition |
Commanded, requested and return value | |
ST element | .D_Command .D_Request .D_State |
Data type | INT |
Value range | [0, 67] |
Redirection | |
ST element | . X_Enable |
Feed hold ON/OFF | |
Description | Channel-specific feed hold. Setting this element to TRUE means immediate ramp-down of the feed rate during interpolation in accordance with the set accelerations to feed rate = 0. |
| MCControlBoolUnit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_FeedHold |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Feed hold ON, FALSE] |
Redirection | |
ST element | . X_Enable |
In the current operation mode the channel can be stopped by a FEEDHOLD or by a MCM-STOP-command (see States graph of the operating modes). In both cases the operation mode shows the state HOLD.
Otherwise after a stop the channel can be continued by removing the FEEDHOLD or by a MCM-RESUME.
This means the signals FEEDHOLD or MCM-STOP can be used symmetrically. A MCM-STOP internal creates a FEEDHOLD. This means, the PLC must provide the feedhold-control unit to push the MCM-STOP-command.
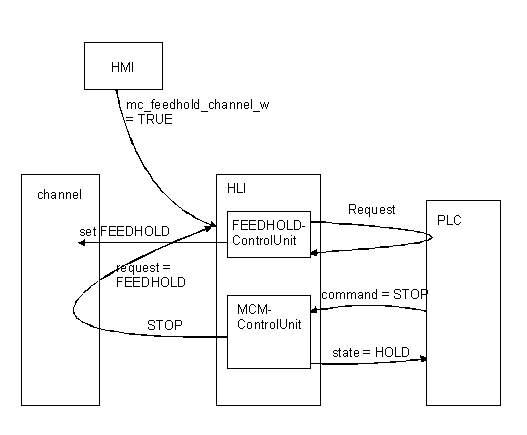 Fig.9: Fig.0.7: Interaction Feedhold and MCM-STOP
Fig.9: Fig.0.7: Interaction Feedhold and MCM-STOPEmergency stop | |
Description | If this element is set active (TRUE) for emergency stop, interpolation is aborted immediately by output of the zero setpoint or by a deceleration in accordance with emergency deceleration. The NC kernel reverts to Error state. This type of movement influencing has maximum priority. |
| MCControlBoolUnit, see description Control Unit |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_EmergencyStop |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Emergency stop active, FALSE] |
Redirection | |
ST element | . X_Enable |
Single-Block mode | |
Description | Activating/deactivating Single-Block mode. Single-Block mode refers only to motion blocks. For as long as Single-Block mode is activated, the system is decelerated to feed rate = 0 at the end of each motion block. The following blocks can then be executed only by setting element continue motion if all axes are in the control window. The next NC block is then executed with each leading edge of the signal. |
| MCControlBoolUnit, see description Control Unit |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_SingleBlock |
Commanded, requested and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE, FALSE] |
Redirection | |
ST element | .X_Enable |
Optional stop | |
Description | Activating/deactivating optional stop. If function M01 (optional stop) is programmed in the current block of the NC program, setting this element to value TRUE allows a stop at the end of the block (ramped deceleration in accordance with the permitted accelerations). The following block can be enabled by activating element Continue Machining if the NC kernel indicates that all axes are in the control window by resetting status flag X_WaitAxesInPosition. |
| MCControlBoolUnit, see description Control Unit |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_M01StopEnable |
Commanded, requested, and return value | |
ST element | . X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Optional stop active, FALSE] |
Redirection | |
ST element | . X_Enable |
Continue motion | |
Description | If the value of element Continue Motion is set to TRUE, program execution interrupted by selection of Single-Block mode and/or Optional stop and/or by M00 in the NC program is resumed. The precondition for this is that all axes be in the control window. An NC block is executed with each leading edge at this input. |
| MCControlBoolUnit, see description Control Unit |
Characteristics | Edge evaluation |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_ContinueMotion |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE, FALSE] |
Redirection | |
ST element | . X_Enable |
Machining simulation ON/OFF | |
Description | Activating/deactivating machining simulation. During machining simulation, all technology functions of the NC program are not output to the PLC but acknowledged internally. |
| MCControlBoolUnit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_MachiningSimulation |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE, FALSE] |
Redirection | |
ST element | . X_Enable |
Feed override | |
Description | The feed override allows the programmed tool path feed rate to be weighted with an additional percentage factor. |
| MCControlUNS16Unit, see description Control Unit |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS16Unit_OverrideFeed rate |
Commanded, requested, and return value | |
ST element | .D_Command .D_Request .D_State |
Unit | 0.1 % |
Data type | UINT |
Value range | [0, P-CHAN-00056] P-CHAN-00056 is a channel-specific parameter. The default value is 1500. See [Channel Parameter]. |
Redirection | |
ST element | . X_Enable |
Rapid feed override | |
Description | By the rapid feed override the G0 movements can be weighted by an additional factor. See also the characteristics described below! |
| MCControlUNS16Unit, see description Control Unit |
Access | PLC Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS16Unit_OverrideRapidMove |
Commanded, requested and return value | |
ST element | .D_Command .D_Request .D_State |
Unit | 0.1 % |
Data type | UINT |
Value range | [0, 1000] |
Redirection | |
ST element | .X_Enable |
Characteristics | |
Parameterization/ mode of operation | The rapid feed override is only active, if this function is also activated in the channel parameters list. Otherwise, there is made no distinction between feed and rapid feed blocks. The several modes can be set by the channel parameter P-CHAN-00181:
The rapid feed override is active. In feed blocks the feed override is active and in rapid feed blocks only the rapid feed override is active. |
Acceleration override | |
Description | Use the acceleration override to get an additional weighing factor for the trajectory acceleration If necessary, the trajectory acceleration is set to the nominal value in dynamic movement phases. If the feedhold is active, the override value is ignored. The interface is only effective if the channel parameter |
| MCControlUNS16Unit, s. description Control Unit |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS16Unit_OverrideAcceleration |
Commanded, requested and return value | |
ST element | .D_Command .D_Request .D_State |
Unit | 0.1 % |
Data type | UINT |
Value range | [50, 1000] |
Redirection | |
ST element | .X_Enable |
Interrupt output of command values on real axes | |
Description | The output of command values of the NC-channel on physical axes is interrupted. The NC-channel is stopped and the assignment to the real axes is disabled. After that the physical axes can be requested and moved by another channel. During this a different logical axis can be assigned to a physical axis. After removing this interruption the axes can be requested again and the original channel can continue with movement. |
| MCControlBoolUnit, s. descriptionControl Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_SuspendAxisOutput |
Commanded, requested, and return value | |
ST element | . X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE - , FALSE] |
Redirection | |
ST element | . X_Enable |
External input of feed rate | |
Description | External input of feed rate. The activation of the preselected feed rate is done via the control unit MCControlBoolUnit_ExtCommandSpeedValid. |
| MCControlUNS32Unit, s. description Control Unit |
Characteristics | The feed rate transferred by this interface is automatically restricted to the limits defined in the axis parameters. |
Unit | 1μm/s |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS32Unit_ExtCommandSpeed |
Commanded and requested value | |
ST element | .D_Command . D_Request |
Data type | UDINT |
Return value | |
ST element | . D_State |
Data type | UDINT |
Characteristics | In D-State the really used feed rate in interpolator including possible override manipulation is displayed. |
Redirection | |
ST element | . X_Enable |
Activation of external feed rate | |
Description | Activation of the feed rate commanded in the control unit MCControlUNS32Unit_ExtCommandSpeed. To reach the commanded feed rate, all axes involved in movement are accelerated or decelerated. |
| |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_ExtCommandSpeedValid |
Commanded, requested and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE, FALSE] |
Redirection | |
ST element | . X_Enable |
Input disable for interpolator | |
Description | Disabling reading of channel blocks in interpolator. When this Control Unit is activated, the interpolator stops after executing the already read in blocks. |
| |
Access | PLC reads Request + State and writes Command + Enable |
ST-Path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_InputDisable |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE, FALSE] |
Redirection | |
ST element | . X_Enable |
OTC radius offset | |
Description | The tool radius can be adapted by setting the wear offset according to the wear. Unit: 0.1µm |
| MCControlSGN32Unit, see description Control Unit |
Characteristics | Assigned offsets are adjusted over several cycles. |
Access | PLC reads Request + State and writes Command + Enable |
ST-Path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlSGN32Unit_OTCRadiusOffset |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request . X_State |
Data type | DINT |
Value range | [-P-TOOL-00031, P-TOOL-00031] |
Redirection | |
ST element | . X_Enable |
Reduced feed, channel | |
Description | When this signal is activated path velocity is reduced to the values defined in P-AXIS-00214 respectively P-AXIS-00155. See also [Axis Parameter]. |
| MCControlBoolUnit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data. MCControlBoolUnit_ReducedFeed |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Reduced feed active, FALSE = Reduced feed not active] |
Redirection | |
ST element | . X_Enable |
Reduced feed in zone 1, channel | |
Description | When this signal is activated and axis position is within the values defined in P-AXIS-00085 and P-AXIS-00093 path velocity is reduced to the value defined in P-AXIS-00030. If necessary velocity is reduced after entering the zone. See also [Axis Parameter]. |
| MCControlBoolUnit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data. MCControlBoolUnit_ReducedFeedZone |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Reduced feed in zone 1 active, FALSE = Reduced feed in zone 1 not active] |
Redirection | |
ST element | . X_Enable |
Reduced feed in zone 2, channel | |
Description | When this signal is activated and axis position is within the values defined in P-AXIS-00097 and P-AXIS-00105 path velocity is reduced to the value defined in P-AXIS-00030. If necessary, velocity is reduced after entering the zone. See also [Axis Parameter]. |
| MCControlBoolUnit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_ReducedFeedZone2 |
Commanded, requested and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Reduced feed in zone 2 active, FALSE = Reduced feed in zone 2 not active] |
Redirection | |
ST element | . X_Enable |
Time override valid | |
Description | Activate time override |
| MCControlBoolUnit, see description Control Unit |
Characteristics |
|
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlBoolUnit_OverrideTimeValid |
Commanded, requested, and return value | |
ST element | .X_Command .X_Request .X_State |
Data type | BOOL |
Value range | [TRUE = Time override is active, time override is not active] |
Redirection | |
ST element | . X_Enable |
Notice | |
Time override affects feed and acceleration independent from real time functions as feed hold or security functions as reduced speed. |
Time override | |
Description | Time override functionality allows to influence CNC internal time base. It acts like slow motion. Time override affects feed and acceleration with different factors.
|
| MCControlUNS16Unit, see description Control Unit |
Characteristics | Using channel parameter P-CHAN-00111 time override also affects the dwell time functionality. See [Channel Parameter].see "Extracted nested table 9" |
Access | PLC reads Request + State and writes Command + Enable |
ST path | pMC[channel_idx]^.addr^.MCControlBahn_Data.MCControlUNS16Unit_OverrideTime |
Commanded, requested and return value | |
ST element | .command_w .request_r . state_r |
Unit | 0.1 % |
Data type | UINT |
Value range | [100, 1000] |
Redirection | |
ST element | . enable_w |