System-Komponenten
Analog zu anderen TwinCAT Komponenten ist TwinCAT Vision in die auf Visual Studio basierende TwinCAT-Entwicklungsumgebung und in die Echtzeit-fähige TwinCAT-Laufzeitumgebung integriert. Folgend sind die Bestandteile des TwinCAT Vision Systems erklärt.
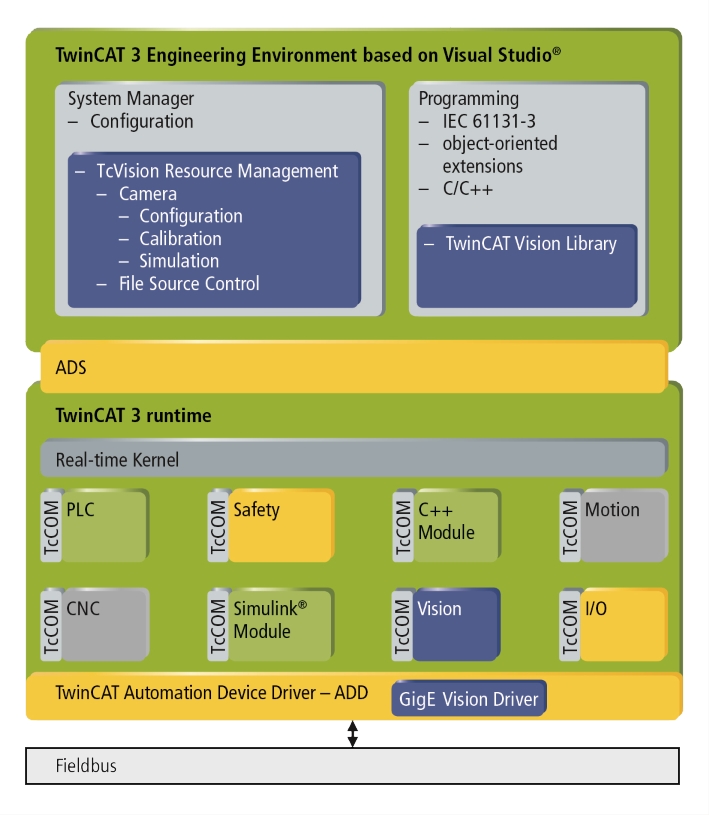
Konfigurationsassistenten
- Industriekameras können über die GigE Vision Schnittstelle angebunden werden. Dabei stehen Assistenten zur Konfiguration, Kalibrierung und Simulation der Kameras zur Verfügung.
- Die Einspeisung von Bildern aus dem Dateisystem in die SPS Laufzeit ist durch ein sog. File Source Element möglich.
- Die Konfiguration von Rechenkernen und dem Router-Speicher für TwinCAT Vision ist grundsätzlich in den TwinCAT Echtzeiteinstellungen vorzunehmen.
- TwinCAT Vision kann TwinCATs Multi-Core-Unterstützung nutzen, um bestimmte Algorithmen parallelisiert auszuführen. Entsprechende Einstellungen erfolgen im Vision Job Pool.
Bibliothek
Zur Programmierung von Bildverarbeitungsabläufen stellt TwinCAT Vision eine Bibliothek mit einer Vielzahl von Algorithmen bereit. Darin sind ebenfalls Funktionsblöcke enthalten, die als Schnittstelle für Kameras und das Dateisystem dienen. Als detaillierte Beschreibung aller Bibliothekselemente existiert die API-Referenz.
Debugging-Werkzeuge
Zum Debugging von Bildverarbeitungsabläufen stellt TwinCAT Vision folgende Mechanismen zur Verfügung:
- Das ADS Image Watch dient der Live-Visualisierung von Kamera-Aufnahmen und Zwischenergebnissen. Es überträgt Bilder aus der SPS-Laufzeit per ADS in die Entwicklungsumgebung und zeigt sie dort an.
- Sämtliche TwinCAT Vision Funktionen geben basierend auf ADS Return Codes eine Auskunft über ihren Ausführungsstatus (siehe HRESULT).
- Für die Programmierung können sämtliche TwinCAT-Debugging Funktionen wie Breakpoints u. Ä. genutzt werden.
GigE Vision Treiber
TwinCAT Vision enthält einen Echtzeit-fähigen GigE Vision Treiber. Er wird sowohl in der Entwicklungsumgebung zur Kamera-Konfiguration, als auch in der TwinCAT Laufzeit genutzt. Er kommuniziert gemäß dem GigE Vision Standard über UDP/IP mit Industriekameras. Über diese Schnittstelle werden Kameras im Netzwerk gefunden und konfiguriert sowie Bilddaten von der Kamera empfangen.
TwinCAT Vision Service
Für einige Funktionalitäten muss TwinCAT Vision zur Laufzeit mit Komponenten außerhalb der Echtzeit kommunizieren. Beispielsweise lädt das File Source Control Bilder aus dem Dateisystem ein. Dazu stellt der TwinCAT Vision Service eine zentralisierte, auf ADS basierende Kommunikationsschnittstelle zwischen der TwinCAT-Laufzeit und externen Vision-Komponenten dar.
TwinCAT HMI Vision Extension
Die TwinCAT HMI Vision Extension ist eine Erweiterung für die TwinCAT HMI, die die Übertragung von Bildern aus der SPS hin zur TwinCAT HMI ermöglicht. So können Bilder aus der SPS direkt mit dem HmiImageControl in der Web-basierten HMI angezeigt werden.
TwinCAT HMI Vision Controls
Das TwinCAT HMI Vision Controls Paket stellt Vision spezifische Controls als Erweiterung für die TwinCAT HMI bereit. Es beinhaltet z. B. ein Control, das zusätzlich zur Bildanzeige noch viele weitere Werkzeuge und Informationsanzeigen bereitstellt. Die Funktionen und Anzeigen können per Konfiguration einfach angepasst und ohne zusätzliche Programmierung direkt verwendet werden.