Service Configuration
Der Vision-Service bietet ein Nicht-Echtzeit-Gegenstück für einige Echtzeit-Komponenten (z.B. Funktionsblöcke). Dazu implementiert der Vision-Service einen ADS-Server, was den Zugriff sowohl aus der Echtzeit, als auch aus der Entwicklungsumgebung ermöglicht.
Der Vision-Service ermöglicht den TwinCAT Vision API-Funktionsblöcken den indirekten Zugriff auf die Festplatte aus der Echtzeitumgebung, z.B. um Bilder zu laden oder zu speichern.
Die Konfiguration des Vision-Services erfolgt unter VISION > Service Configuration.
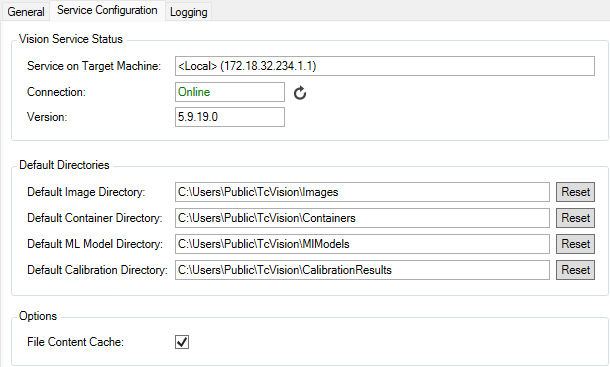
Vision Service Status
Service on Target Machine | Zielsystem, auf dem der TwinCAT Vision Service läuft. |
Connection | Verbindungsstatus zwischen Entwicklungsumgebung und Service. Dies ist ein guter Indikator, ob der Service ordnungsgerecht läuft. |
Version | Versionsnummer des TwinCAT Vision Service. |
 | Vor der ersten Verwendung muss der Vision-Service auf dem Zielsystem installiert werden, siehe Installationsanleitung. |
Manuelles Starten des Vision-Service
Normalerweise wird der Vision Service automatisch zusammen mit TwinCAT gestartet. Falls der Vision Service dennoch offline ist, kann er mit einem TwinCAT Neustart (Klick auf  oder
oder  ) reaktiviert werden. Falls dies nicht funktioniert oder der Service wiederholt nicht startet, sollte er bei TwinCAT neu registriert werden, siehe dazu: Vision Service startet nicht.
) reaktiviert werden. Falls dies nicht funktioniert oder der Service wiederholt nicht startet, sollte er bei TwinCAT neu registriert werden, siehe dazu: Vision Service startet nicht.
Default Directories
Diese Pfade legen fest, an welcher Stelle auf dem Zielsystem TwinCAT Vision standardmäßig nach Dateien suchen und diese Ablegen soll.
Default Image Directory | Dieser Pfad wird standardmäßig von den Funktionsblöcken zum Lesen und Schreiben von Bildern verwendet: |
Default Container Directory | Dieser Pfad wird standardmäßig von den Funktionsblöcken zum Lesen und Schreiben von Containern verwendet: |
Default ML-Model Directory | Dieser Pfad wird standardmäßig von den Funktionsblöcken zum Lesen und Schreiben von ML-Modellen verwendet: |
Default Calibration Directory | Dieser Pfad wird standardmäßig von den Funktionsblöcken zum Lesen und Schreiben von Kalibrationsergebnissen verwendet: |
Eine vollständige Liste aller wichtigen Pfade finden Sie in der Sektion Wichtige Pfade.
Vision Service Log
Alle wichtigen Service-Ereignisse werden auf dem Zielsystem in die Logdatei TcVnService.log geschrieben, welche auf dem Zielsystem unter C:\ProgramData\Beckhoff\TcVnService zu finden ist. Bei Supportanfragen zum TwinCAT Vision Service ist die Logdatei, sowie der Zeitpunkt, zu dem das Verhalten aufgetreten ist, mitzusenden. Auf dem Entwicklungssystem gibt es zudem einen Logger für alle Komponenten unterhalb des Vision-Knotens.
Vision Service Cache Einstellungen
Per Default hinterlegt der Vision Service die eingelesenen Bilder im Cache, um die angeforderten Bilder beim nächsten Abruf schneller bereitstellen zu können. Diese optimierte Betriebsweise deckt die Anforderungen der meisten Anwendungen ab und wird daher empfohlen.
Für den Fall, dass sich der Bildinhalt ändert, der Name der Datei jedoch gleichbleibt, kann das Cachen der Bildinhalte über die File Content Cache-Option deaktiviert werden.
| Vision Service beenden Zum Ändern der Einstellungen muss zuerst der TwinCAT Vision Service (TcVnService.exe) über den Taskmanager beendet werden, da ansonsten die Änderungen nicht übernommen werden. Danach kann der Service durch ein Restart in Config Mode wieder gestartet werden. |
Hinweis | |
Inkonsistente Daten Stellen Sie sicher, dass kein gleichzeitiger Zugriff von mehreren Prozessen auf dieselbe Datei erfolgt und es so zu einer Dateikorruption oder inkonsistenten Daten kommen kann. |