Advanced Settings
Nach dem Hinzufügen eines EtherCAT (Direct Mode) zur E/A-Konfiguration, öffnen Sie die Registerkarte "EtherCAT" auf der rechten Seite und drücken Sie auf die Schaltfläche "Advanced Settings..." . Dies öffnet den Dialog "Erweiterte Einstellungen". Die folgenden Dialoge sind im Dialog 'Erweiterte Einstellungen' enthalten:
Dialog | Beschreibung | |
|---|---|---|
Status Maschine | Allgemeine Einstellungen des Masters. | |
Mit Hilfe des Dialogs 'Slave Einstellungen' kann der Anwender Einstellungen für alle EtherCAT-Slaves vornehmen. Um diese Einstellungen für ein einzelnes EtherCAT-Slave-Gerät zu ändern, öffnen Sie den Dialog 'Erweiterte Einstellungen' des Slaves und öffnen Sie den Dialog 'Verhalten'. | ||
Zyklische Frames | Mit Hilfe des 'Sync Tasks'-Dialogs kann man die maximale Anzahl von Sync Tasks und die MTU der zyklischen Ethernet-Frames, die vom Master gesendet werden, einstellen. | |
Distributed Clocks | Der Dialog 'Distributed Clocks Master' ermöglicht es dem Benutzer, die Master-Einstellungen der Distributed-Clocks anzuzeigen und zu ändern. | |
Diagnosis | Der 'Online Anzeige'-Dialog ermöglicht es dem Benutzer, zusätzliche Spalten zur Listenansicht der Registerkarte 'Online' des EtherCAT-Geräts hinzuzufügen. | |
Status Maschine Master Einstellungen
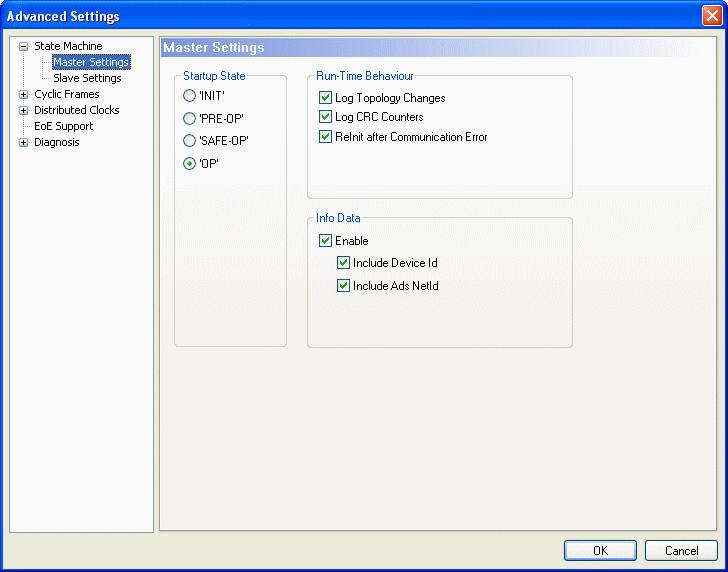
Startup Status: Der EtherCAT-Master läuft nach dem Start in dem im Optionsfeld ausgewählten Status. Wird z.B. 'OP' ausgewählt, durchläuft der EtherCAT-Master alle EtherCAT-Zustände, um in den Status 'OP' anzukommen. Um nach dem Start im Status "INIT" zu bleiben, muss die Option 'INIT' ausgewählt werden.
Laufzeit Verhalten
Topologie-Änderungen loggen: Wird dieses Kontrollkästchen aktiviert, werden Topologie-Änderungen protokolliert.
CRC-Zähler loggen: Wird dieses Kontrollkästchen aktiviert, werden die CRC-Zähler protokolliert.
ReInit nach Kommunikationsfehler: Wird dieses Kontrollkästchen aktiviert, werden alle Slaves nach dem Auftreten eines Kommunikationsfehlers auf init gesetzt.
Info Daten
Enable: Wird dieses Kontrollkästchen aktiviert, wird das "Info"-Prozessabbild unter dem EtherCAT-Gerät hinzugefügt:
Zusätzlich wird dem EtherCAT-Gerät und den angeschlossenen EtherCAT-Slave-Geräten ein Eintrag "InfoData" hinzugefügt. 'InfoData' enthält Eingangsvariablen, die Informationen über das EtherCAT-Gerät liefern, die sich normalerweise nicht sehr oft ändern. Variablen, die auf die "Info"-Bildern abgebildet werden, werden nicht zyklisch aktualisiert, sondern nur, wenn das Abbild sich geändert hat. ChangeCnt zeigt an, wie oft sich der Inhalt des Abbildes geändert hat.
Device Id einfügen: Wird dieses Kontrollkästchen aktiviert, wird die Eingangsvariable "DevId" zu InfoData hinzugefügt. Dies ist die Geräte-ID des EtherCAT-Gerätes.
Ads NetId einfügen: Wird dieses Kontrollkästchen aktiviert, wird die Eingabevariable "AmsNetId" zu InfoData hinzugefügt. Die AmsNetId ist ein Parameter, der für die Kommunikation über ADS mit dem EtherCAT-Master-Gerät erforderlich ist. Der ADS-Port des EtherCAT-Masters ist immer 0xFFFF(65535) und der Ads-Port eines EtherCAT-Slave-Geräts ist gleich der festen Adresse (siehe EtherCAT Addr) des Slaves.
Status Maschine Slave Einstellungen
Mit Hilfe des Dialogs 'Slave Einstellungen' kann der Anwender Einstellungen für alle EtherCAT-Slaves vornehmen. Um diese Einstellungen für ein einzelnes EtherCAT-Slave-Gerät zu ändern, öffnen Sie den Dialog 'Erweiterte Einstellungen' des Slaves und öffnen Sie den Dialog 'Verhalten'.
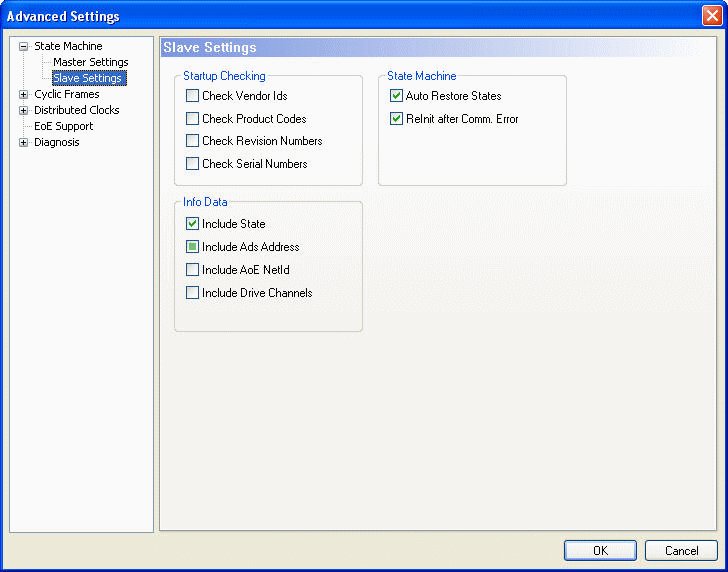
Startup Überprüfungen
Der Benutzer kann festlegen, welche Slave-Informationen beim Start vom Master überprüft werden sollen.
Überprüfe Vendor Ids: Wird dieses Kontrollkästchen aktiviert, überprüft der Master, ob die Hersteller-ID jedes Slave-Geräts mit der konfigurierten übereinstimmt.
Überprüfe Produktcodes: Wird dieses Kontrollkästchen aktiviert, prüft der Master, ob der Produktcode jedes Slave-Geräts mit dem konfigurierten übereinstimmt.
Überprüfe Revisionsnummern: Wird dieses Kontrollkästchen aktiviert, überprüft der Master, ob die Revisionsnummer jedes Slave-Geräts mit der konfigurierten übereinstimmt.
Überprüfe Seriennummern: Wird dieses Kontrollkästchen aktiviert, überprüft der Master, ob die Seriennummer jedes Slave-Geräts mit der konfigurierten übereinstimmt.
Status Maschine
Auto Status Wiederherstellung: Wird dieses Kontrollkästchen aktiviert, versucht der EtherCAT-Master, den Zustand eines EtherCAT-Slaves automatisch wiederherzustellen. Wechselt ein EtherCAT-Slave-Gerät vom Fehlerzustand (ERR SAFE-OP, ERR OP usw.) in einen gültigen Zustand (SAFE-OP, OP usw.), versucht der EtherCAT-Master, das Gerät auf den aktuellen Zustand des Masters zu setzen.
ReInit nach Komm. Fehler
Info Daten
Um diese Gruppe zu aktivieren, müssen die Infodaten im Dialog 'Master Einstellungen' aktiviert werden.
Status einfügen: Wird dieses Kontrollkästchen aktiviert, wird die Eingangsvariable 'State' zum InfoData-Eintrag jedes EtherCAT-Slaves hinzugefügt. Diese Variable enthält den aktuellen EtherCAT-Status und den Verbindungsstatus des EtherCAT-Slave-Geräts.
Ads Adresse einfügen: Wird dieses Kontrollkästchen aktiviert, wird die Eingangsvariable 'AdsAddress' zum InfoData-Eintrag Info jedes EtherCAT-Slaves hinzugefügt. Diese Variable wird standardmäßig für alle EtherCAT-Slaves hinzugefügt, die ein Mailbox-Protokoll wie CoE (CANopen over EtherCAT) oder SoE unterstützen.
Gerätekanäle einfügen: Wird dieses Kontrollkästchen aktiviert, werden die Eingangsvariablen 'ChnX' (X=Kanalnummer) zum InfoData-Eintrag jedes Antriebs hinzugefügt.
Synchronisation Sync Tasks
Mit Hilfe des 'Sync Tasks'-Dialogs kann man die maximale Anzahl von Sync Tasks und die MTU der zyklischen Ethernet-Frames, die vom Master gesendet werden, einstellen.
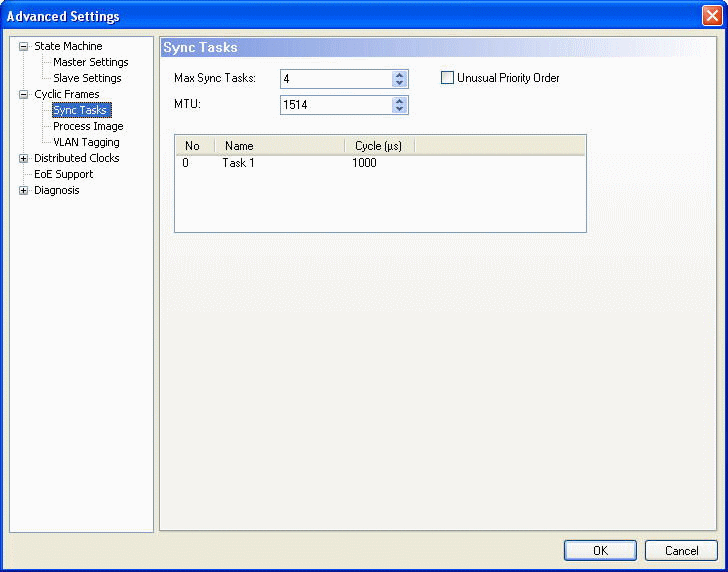
Max Sync Tasks: Maximale Anzahl von Tasks, die an der Prozessdatenkommunikation teilnehmen können. Wie viele Tasks tatsächlich an der Prozessdatenkommunikation teilnehmen, hängt vom Mapping der Variablen der EtherCAT-Slave-Geräte ab. Für jede Task, die an der Prozessdatenkommunikation teilnimmt, wird zyklisch mindestens ein EtherCAT-Frame gesendet. Wenn "Max Sync Tasks" auf zwei eingestellt ist und die Konfiguration aus zwei EtherCAT-Slave-Geräten besteht, deren Variablen auf zwei verschiedene Tasks abgebildet werden, würden zwei Tasks an der Prozessdatenkommunikation teilnehmen. Würden die Variablen auf die gleiche Task abgebildet, würde nur eine Task an der Prozessdatenkommunikation teilnehmen.
MTU: Die MTU (Maximum Transmission Unit) gibt die maximale Größe in Bytes der zyklischen Ethernet-Frames, die vom Master gesendet werden, an. Die minimale Größe beträgt 28 Bytes ( 14 Bytes(Ethernet-Header) + 2 Bytes(E88A4-Header) + 10 Bytes(EtherCAT-Header) + 0 Byte( EtherCAT Data) + 2 Bytes(EtherCAT Working Counter)) und die maximale Größe 1514 (14 Bytes(Ethernet-Header) + 2 Bytes(E88A4-Header) + 10 Bytes(EtherCAT-Header) + 1486 Bytes( EtherCAT Data) + 2 Bytes(EtherCAT Working Counter)).
Synchronisation Distributed Clocks
Der Dialog 'Distributed Clocks Master' ermöglicht es dem Benutzer, die Master-Einstellungen der Distributed-Clocks anzuzeigen und zu ändern.
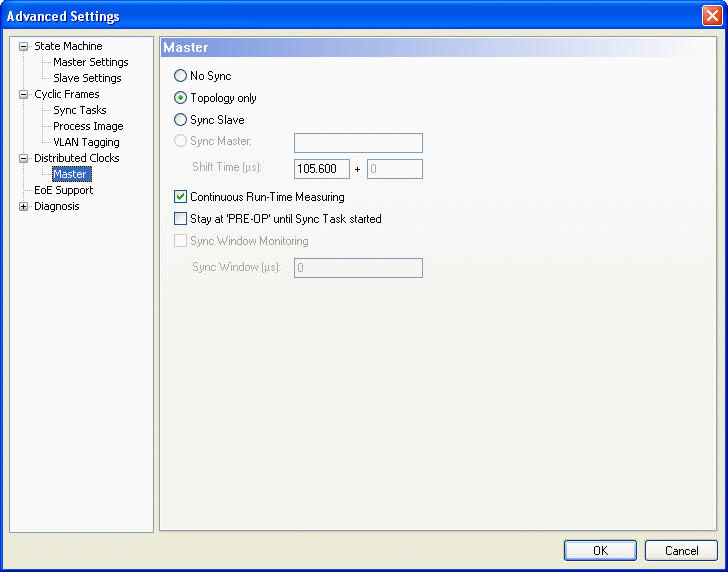
No Sync: In diesem Modus findet keine Synchronisation der EtherCAT-Geräte statt.
Topology Only: In diesem Modus findet keine Synchronisation der EtherCAT-Geräte statt, sondern die Topologie wird vom Master berechnet. Der Master muss die Topologie kennen, um die Verzögerungszeit zwischen den Slaves berechnen zu können. Daher wird diese Berechnung immer in den Modi "Sync Slave" und "Sync Master" durchgeführt.
Sync Slave: In diesem Modus erfolgt die Synchronisation der EtherCAT-Geräte, wobei der EtherCAT-Master als Referenzuhr verwendet wird. Infolgedessen sendet der Master zyklisch ein BWR-Kommando (Broad cast write), um die Systemzeit auf alle Slaves zu verteilen. Da die Master-Clock nicht so genau ist wie die Clock eines EtherCAT-Slave-Gerätes, sollte man in der Regel den 'Sync Master'-Modus bevorzugen und das erste EtherCAT-Gerät als Referenzuhr setzen.
Sync Master: In diesem Modus erfolgt die Synchronisation der EtherCAT-Geräte, wobei der EtherCAT-Slave mit dem Recht auf "Sync Master" als Referenzuhr gesetzt wird. Als Konsequenz sendet der Master zyklisch ein EtherCAT-Kommando zum Auslesen der Systemzeit des "Sync-Master"-Gerätes und verteilt diese Zeit an alle anderen Slave-Geräte.
Der Modus "Sync Master" ist deaktiviert, wenn kein Gerät als Referenzuhr eingestellt ist. Um diesen Modus zu aktivieren, muss man ein Slave-Gerät als Referenzuhr-Gerät konfigurieren (siehe Distributed Clock Einstellungen). Die ersten drei Sync-Modi sind deaktiviert, wenn ein Referenzuhr-Gerät eingestellt ist. Um einen dieser Modi auswählen zu können, darf kein Slave-Gerät als Referenzuhr eingestellt sein:
- Wählen Sie das "Sync Master"-Gerät in der Baumansicht des Systemmanagers aus
- Gehen Sie auf die Registerkarte "EtherCAT" und klicken Sie auf "Erweiterte Einstellungen..." . Dies öffnet den Dialog "Erweiterte Einstellungen".
- Wählen Sie in der Baumansicht des Dialogs den Eintrag "DistributedClocks/Settings".
- Deaktivieren Sie den Eintrag "Reference Clock Device"
Diagnose Online Anzeige
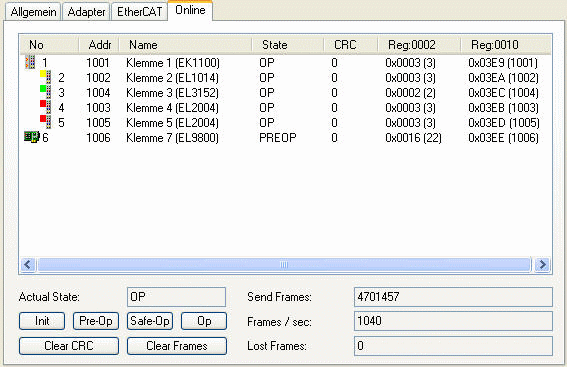
Der "Online Anzeige"-Dialog ermöglicht es dem Benutzer, zusätzliche Spalten zur Listenansicht der Registerkarte "Online" des EtherCAT-Geräts hinzuzufügen. Die zusätzlichen Spalten zeigen den Inhalt der in diesem Dialog ausgewählten ESC-Register an. Sie können entweder ein bestimmtes Register auswählen, indem Sie ein bestimmtes Element in der Listenansicht markieren, oder eine Adresse in das Bearbeitungsfeld eingeben und auf die Schaltfläche "Hinzufügen" klicken.
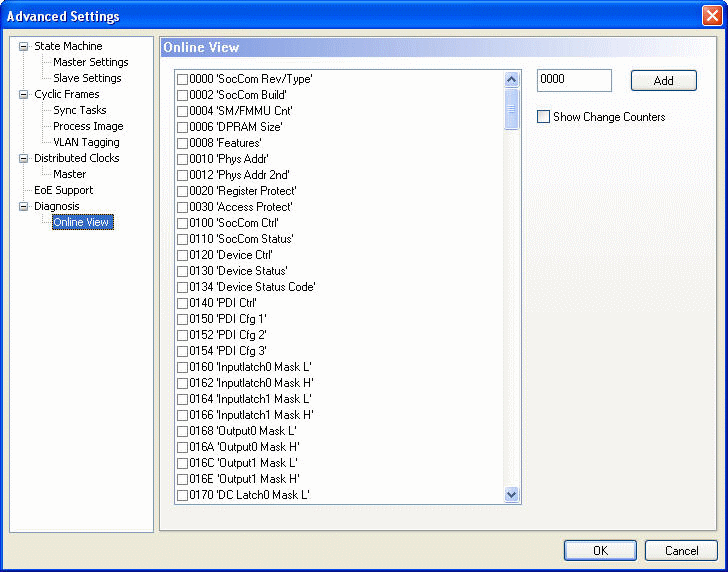
Zeige Änderungszähler: Wird dieses Kontrollkästchen aktiviert, wird der Listenansicht auf der Registerkarte "Online" eine Spalte hinzugefügt, in der zwei durch einen Schrägstrich getrennte Zähler angezeigt werden. Der erste Zähler zeigt die Anzahl der abnormalen Zustandsänderungen an. Der zweite Zähler zeigt an, wie oft die Kommunikation mit dem Slave-Gerät unterbrochen wurde.
Beispiel:
Um die physikalische Adresse und den Soccom Build eines EtherCAT-Slave-Gerätes anzuzeigen, müssten wir den Eintrag 0002 und den Eintrag 0010 in der Listenansicht auswählen:
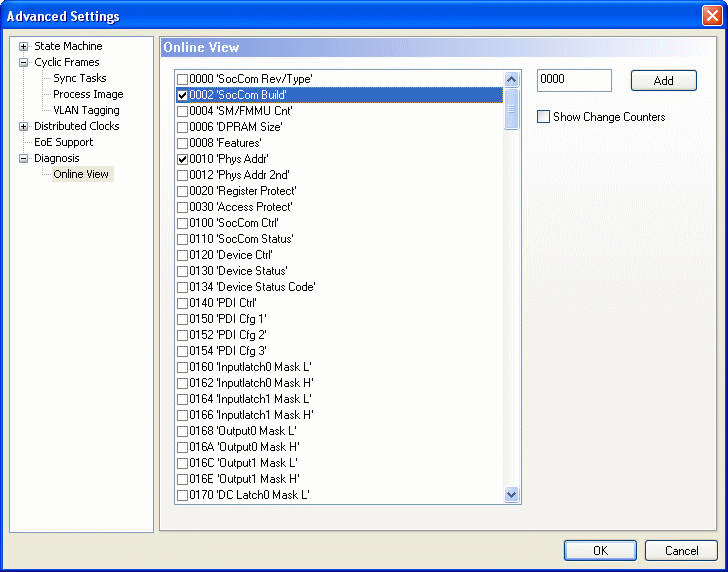
Als nächstes müssen Sie den Dialog "Erweiterte Einstellungen" schließen und auf die Registerkarte "Online" des EtherCAT-Master-Geräts wechseln. Hier können Sie sehen, dass zwei neue Spalten zur Listenansicht hinzugefügt wurden, eine für den "Soccom Build" (Reg:0002) und eine für die physikalische Adresse des EtherCAT-Geräts (Reg:0010).