EtherCAT(Direct Mode) "Online" tab:
EtherCAT (Direct Mode) ist ein Realtime-Ethernet-Gerät, das nur das EtherCAT-Protokoll unterstützt. Intern verwendet es die gleichen Netzwerktreiber wie das Standard-Realtime-Ethernet-Gerät (siehe Ethernet Miniport (Real-Time)). Die Installationsanweisungen für die Netzwerktreiber können unter Anhang C eingesehen werden. Das EtherCAT (Direct Mode) Gerät sollte verwendet werden, wenn nur EtherCAT-Slave-Geräte an den Netzwerkadapter angeschlossen sind. Es bietet zusätzliche Funktionen, die im Standard-Realtime-Ethernet-Gerät nicht verfügbar sind. Wenn Sie nach dem Gerät scannen, sollte mindestens ein EtherCAT-Slave-Gerät mit dem Gerät verbunden sein, ansonsten wird das Rt-Ethernet-Gerät ausgewählt. Um den Gerätetyp von Realtime-Ethernet-Gerät auf EtherCAT (Direct Mode) zu ändern, müssen Sie das Kontextmenü des Geräts in der Baumansicht des Systemmanagers öffnen. Dann müssen Sie den Menüeintrag "Change To/ EtherCAT(Direct Mode)" auswählen:
Registerkarte EtherCAT(Direct Mode) "Adapter"
Nach dem Hinzufügen eines EtherCAT (Direct Mode) zur E/A-Konfiguration ist auf der rechten Seite die Registerkarte "Adapter" verfügbar:
Der aktuell ausgewählte Ethernet-Adapter wird auf dieser Registerkarte "Adapter" angezeigt.
Suchen...: Sucht nach TwinCAT Real-Time Ethernet kompatiblen Geräten und zeigt diese an.
MAC Adresse: MAC Adresse des Ethernet-Controllers
IP Adresse: Einstellungen aus der Windows-Registrierung. Diese können unter "Systemsteuerung | Netzwerk- und Freigabecenter" im Abschnitt TCP/IP 'Eigenschaften...' geändert werden. Wenn Realtime-Ethernet und "normales" Ethernet auf demselben System mit zwei verschiedenen Netzwerkadaptern verwendet werden, müssen sich die Subnetzadressen dieser Adapter (NICs) unterscheiden! Dennoch müssen die zu Realtime-Ethernet gehörenden Geräte mit der gleichen Subnetzadresse (die ersten beiden Quadrupel) konfiguriert werden wie der Ethernet-Miniport-Adapter und natürlich auch umgekehrt.
Freerun Zyklus: Die Zykluszeit, die verwendet wird, wenn Free-Run aktiv ist (nur Config Mode), kann hier eingestellt werden. Die Zykluszeit im Run Mode ergibt sich automatisch aus dem Verweis auf die Task mit der höchsten Priorität, die mit den Variablen des Adapters oder einer seiner Knoten verknüpft ist.
E/A sperren nach Link Fehler: Wenn dieses Kontrollkästchen aktiviert ist, wird der Prozessdatenaustausch nach einem behobenen Verbindungsproblem (z. B. wenn das Netzwerkkabel abgezogen wurde) nicht automatisch wieder aufgenommen. In einer solchen Situation ist stattdessen ein E/A-Reset erforderlich.
Promiscuous Mode(use with Netmon/Ethereal only): Dieses Kontrollkästchen sollte nur aktiviert werden, wenn man den Netzwerkverkehr mit Tools wie Ethereal oder dem Microsoft Network Monitor aufzeichnen möchte. Wenn dieses Kontrollkästchen aktiviert ist, kopiert das Realtime-Ethernet-Miniport-Gerät alle Frames in die NDIS-Protokollschicht von Windows. Dadurch können die Protokoll-Treiber die Frames erfassen.
Registerkarte EtherCAT(Direct Mode) "EtherCAT"
NetId: Dies ist die NetId des EtherCAT-Master-Geräts. Die NetId ist ein Parameter, der für die Kommunikation mit dem EtherCAT-Master-Gerät über ADS erforderlich ist. Der ADS-Port des EtherCAT-Masters ist immer 0xFFFF(65535) und der Ads-Port eines EtherCAT-Slave-Geräts ist gleich der festen Adresse (siehe EtherCAT Addr) des Slaves.
Advanced Settings...: Öffnet den Advanced Settings Dialog. Dieser Dialog enthält zusätzliche Einstellungen für das EtherCAT-Master-Gerät.
Export Configuration File...: Erzeugt die XML-Masterkonfigurationsdatei. Diese Datei beschreibt die Prozessdaten und die Frames, die während der EtherCAT-Zustandsübergänge gesendet werden.
Sync Unit Zuordnung...: Öffnet den Dialog "Sync Unit Zuordnung". Dieser Dialog kann verwendet werden, um EtherCAT-Slave-Geräte zu separaten Sync Units zu gruppieren.
Topology...: Öffnet den "Topology" Dialog. Dieser Dialog zeigt die Topologie der konfigurierten EtherCAT-Slave-Geräte an.
Die untere Listenansicht zeigt alle zyklischen EtherCAT-Kommandos an, die vom EtherCAT-Master gesendet wurden:
Spalte | Beschreibung |
|---|---|
Frame | Der zyklische Frame, in dem das EtherCAT-Kommando enthalten ist. Ein EtherCAT-Frame kann ein oder mehrere EtherCAT-Kommandos enthalten. |
Cmd | Der Typ des Kommandos. |
Addr | Adresse des Datenbereichs der EtherCAT-Slave-Geräte, die dieses Kommando anspricht. Wenn das EtherCAT-Kommando eine logische Adressierung (LRW, LW oder LR) verwendet, gibt "Addr" die logische Adresse an. Ansonsten geben die oberen 16 Bit immer die physikalische Speicheradresse an und die unteren 16 Bit entweder die feste Adresse des Gerätes (siehe EtherCAT Addr) oder die Auto-Inkrement-Adresse des Gerätes (siehe Auto Inc Addr abhängig vom Typ des Kommandos) |
Len | Länge des Datenbereichs. |
WC | Erwarteter Working Counter. Jeder EtherCAT-Slave, der durch ein EtherCAT-Kommando angesprochen wird, inkrementiert den Working Counter. Wenn es sich um ein Logical Read Write(LRW)-Kommando handelt, erhöht jedes Schreiben von Daten in ein EtherCAT-Slave-Gerät den Working Counter um 2 und jedes Lesen von Daten aus einem EtherCAT-Slave-Gerät erhöht den Working Counter um 1. |
Sync Unit | Sync Unit, zu der das EtherCAT-Kommando gehört. |
Cycle Time(ms) | Zykluszeit, mit der der Frame gesendet wird. |
Actual State: Zeigt den aktuellen Status des EtherCAT-Master-Geräts an.
Send Frames: Zeigt die Anzahl der vom EtherCAT-Master-Gerät gesendeten Frames an.
Frames / sec: Zeigt die Anzahl der gesendeten Frames pro Sekunde an.
Init: Fragt den "Init"-Status vom Master an.
Pre-Op: Fragt den 'Pre-Op'-Status vom Master an.
Safe-Op: Fragt den "Safe-Op"-Staus vom Master an.
Op: Fragt den 'Op'-Status vom Master an.
Clear CRC: Löscht die CRC-Zähler der EtherCAT-Slave-Geräte.
ClearFrames: Setzt den im Eingabefeld "Send Frames" angezeigten Zähler auf 0 zurück.
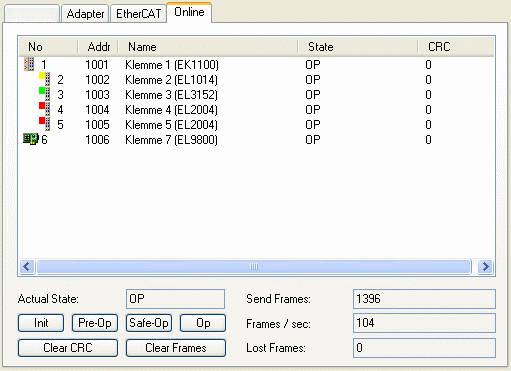
Die Listenansicht zeigt alle EtherCAT-Slave-Geräte und ihre entsprechenden Zustände und CRC-Zähler:
Spalte | Beschreibung |
|---|---|
No | Physikalische Position des Geräts im Kommunikationsring |
Addr | Feste Adresse (siehe EtherCAT Addr) des Slave-Geräts. |
Name | Name des EtherCAT-Gerätes |
State | Status des EtherCAT-Slave-Gerätes. Der Status kann entweder INIT, PRE-OP, SAFE-OP oder OP sein. Wenn das Gerät vom Master nicht gefunden wird oder der Slave den Status nicht ändern kann, wird ERR + der letzte bekannte gültige Status angezeigt. |
CRC | CRC-Zähler des EtherCAT-Slave-Gerätes. Wenn ein einzelnes Slave-Gerät in der Liste ausgewählt wird, werden die CRC-Zähler der Ports A, B und C (falls verwendet) in Klammern aufgeführt. |
Um einen bestimmten Status von einem einzelnen EtherCAT-Slave-Gerät abzufragen, muss man mit der rechten Maustaste auf das Slave-Gerät in der Listenansicht klicken. Dies öffnet das folgende Kontextmenü:
Nun kann man einen der Menüpunkte "Request 'xxx' state" auswählen, um das Gerät in einen anderen Zustand zu versetzen.