EtherCAT Slave Device
EtherCAT-Slave-Gerät Registerkarte "EtherCAT":
Type: Name des EtherCAT-Slave-Geräts.
Product/Revision: Produkt- und Revisionsnummer des EtherCAT-Slave-Geräts.
Auto Inc Addr: Die Auto-Inkrement-Adresse des EtherCAT-Slave-Geräts. Mit der Auto-Inkrement-Adressierung kann jedes Slave-Gerät über seine physikalische Position im Kommunikationsring angesprochen werden. Die Auto-Inkrement-Adressierung wird während der Startphase verwendet, in der der Master die EtherCAT-Adresse an die Slaves vergibt. Der erste Slave im Ring hat eine Adresse von 0 und für jeden folgenden wird die Adresse dekrementiert (0xFFFF(-1),0xFFFE(-2) usw.).
EtherCAT Addr: Die feste Adresse des EtherCAT-Slave-Geräts. Diese Adresse wird vom Master während der Startphase eingestellt. Um den Standardwert zu ändern, müssen Sie das Kontrollkästchen links neben der Adresse aktivieren.
Erweiterte Einstellungen...: Öffnet den Erweiterte Einstellungen Dialog.
Previous Port: Der Port und der Name des EtherCAT-Slave-Geräts, an das dieses Gerät angeschlossen ist. Wenn es möglich ist, dieses Gerät mit einem anderen zu verbinden, ohne die Reihenfolge der EtherCAT-Slave-Geräte im Kommunikationsring zu ändern, wird das Kombinationsfeld aktiviert, und man kann das EtherCAT-Gerät auswählen, mit dem dieses Gerät verbunden werden soll.
EtherCAT-Slave-Gerät Registerkarte "Prozessdaten":
Zeigt die Konfiguration der Prozessdaten an. Die Eingangs- und Ausgangsvariablen des Slave-Gerätes werden als CANopen-Prozessdatenobjekte (PDO) dargestellt. Falls vom Slave-Gerät unterstützt, ermöglicht dieser Dialog dem Benutzer, über PDO Assignment ein anderes PDO auszuwählen und den Inhalt eines einzelnen PDOs zu ändern.
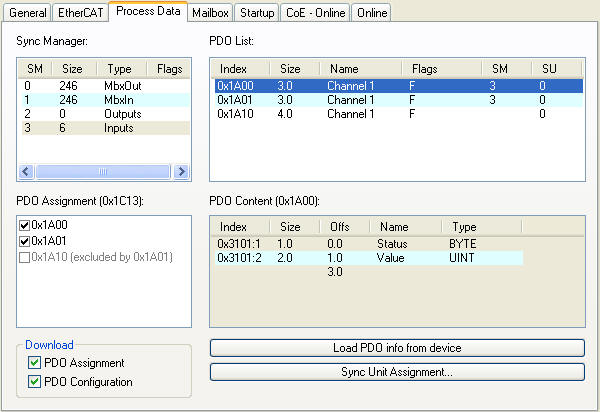
Sync Manager: Listet die Konfiguration der Sync-Manager auf. Wenn das Gerät über eine Mailbox verfügt, wird der Sync Manager 0 für den Mailbox-Ausgang und der Sync Manager 1 für den Mailbox-Eingang verwendet. Der nächste Sync Manager wird für die Prozessdatenausgänge und der letzte Sync Manager für die Prozessdateneingänge verwendet. Wenn ein Element ausgewählt ist, wird die entsprechende PDO-Zuordnung in der Listenansicht "PDO Assignment(0x1C1Sm)" angezeigt (wobei Sm die Nummer des Sync Managers ist).
PDO Assignment (0x1C1Sm) (wobei Sm die Nummer des Sync Managers ist): PDO-Zuweisung für den ausgewählten Sync Manager. Hier werden alle PDOs, die für diesen Sync Manager-Typ definiert sind, mit ihrem Index aufgelistet. Wenn der Outputs Sync Manager in der Listenansicht "Sync Manager" ausgewählt ist, werden alle TxPDOs angezeigt. Wenn der Inputs Sync Manager ausgewählt ist, werden alle RxPDOs ausgewählt. Die geprüften Elemente sind die PDOs, die an der Prozessdatenkommunikation teilnehmen. Diese PDOs werden in der Baumansicht des Systemmanagers als Variablen dieses EtherCAT-Slave-Gerätes angezeigt. Der Name der Variablen ist identisch mit dem Parameter "Name" des PDOs, wie er in der Listenansicht "PDO Liste" angezeigt wird. Wenn ein Element in der Liste "PDO Assignment" deaktiviert ist (nicht aktiviert und grau), bedeutet dies, dass dieses Element für die aktuelle PDO-Zuordnung ausgeschlossen ist. Um dieses PDO auswählen zu können, muss man die derzeit aktivierten PDOs abwählen.
PDO List: Listet alle PDOs auf, die von diesem EtherCAT-Slave-Gerät unterstützt werden. Der Inhalt des ausgewählten PDOs wird in der Listenansicht "PDO Content (index of PDO):" angezeigt. Durch Doppelklick auf einen Eintrag kann man die Konfiguration des PDOs ändern.
Spalte | Beschreibung: | |
|---|---|---|
Index | Index des PDOs. | |
Größe | Größe des PDOs in Byte. | |
Name | Name des PDOs. Wenn dieses PDO einem Sync-Manager zugewiesen ist, erscheint es als Variable des Slave-Geräts mit diesem Parameter als Name. | |
Flags | F | Fester Inhalt. Der Inhalt des PDOs ist fest und kann vom Systemmanager nicht geändert werden. |
M | Obligatorisches PDO. Dieses PDO ist obligatorisch und muss daher einem Sync Manager zugewiesen werden. Daher kann man diesen Eintrag in der Liste "PDO-Zuordnung" deaktivieren. | |
SM | Der Sync Manager, dem dieses PDO zugewiesen ist. Wenn dieser Eintrag leer ist, nimmt das PDO nicht an der Prozessdatenkommunikation teil. | |
SU | Sync Unit, dem dieses PDO zugewiesen ist. | |
PDO Content (Index of PDO ): Zeigt den Inhalt eines PDOs an. Wenn das Fixed Content Flag (Flag = F) des PDOs nicht gesetzt ist, kann der Inhalt vom Benutzer geändert werden.
Download: Wenn das Gerät ein intelligentes Gerät ist und über eine Mailbox verfügt, können die Konfiguration der PDOs und die PDO-Zuordnungen in das Gerät heruntergeladen werden. Dies ist eine optionale Funktion und wird nicht von allen Slave-Geräten unterstützt.
PDO Assignment: Wenn dieses Kontrollkästchen aktiviert ist, wird die in der Listenansicht "PDO Assignment" konfigurierte PDO-Zuordnung während des Starts in das Slave-Gerät heruntergeladen. Die notwendigen Kommandos, die an das Gerät gesendet werden, können in der Registerkarte "Startup" eingesehen werden.
PDO-Konfiguration: Wenn dieses Kontrollkästchen aktiviert ist, wird die Konfiguration der einzelnen PDOs, wie sie in den Ansichten "PDO Liste" und "PDO Inhalt" angezeigt wird, auf das EtherCAT-Slave-Gerät heruntergeladen.
Registerkarte EtherCAT-Slave-Gerät "Online":
Zeigt Online-Informationen über das EtherCAT-Slave-Gerät an.
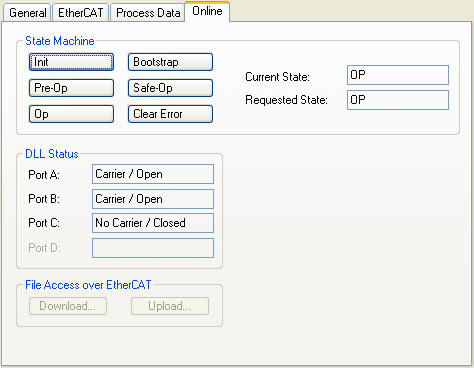
Status Maschine:
Init: Versucht, das EtherCAT-Slave-Gerät in den Init-Status zu setzen.
Pre-Op: Versucht, das EtherCAT-Slave-Gerät in den Pre-Operational-Status zu setzen.
Safe-Op: Versucht, das EtherCAT-Slave-Gerät in den Safe-Operational-Status zu setzen.
Op: Versucht, das EtherCAT-Slave-Gerät in den Operational-Status zu setzen.
Bootstrap: Versucht, das EtherCAT-Slave-Gerät in den Bootstrap-Status zu setzen.
Clear Error: Versucht, das Fehlerflag zu löschen. Wenn ein Slave-Gerät nicht in einen anderen Status wechselt, setzt es das Fehlerflag. Zum Beispiel befindet sich ein Slave-Gerät gerade im Status Pre-Operational, dann fordert der Master den Safe-Operational-Status an. Wenn das Slave-Gerät nicht in Safe-Operational wechselt, setzt es das Fehlerflag. Der aktuelle Status würde als "ERR PREOP" angezeigt. Nach dem Drücken der Schaltfläche "Clear Error" wird das Fehlerflag gelöscht und der aktuelle Status wird wieder als "PREOP" angezeigt.
Current State: Aktueller EtherCAT-Status des Slave-Geräts.
Requested State: EtherCAT-Status, auf den der Master den Slave zu setzen versucht.
Dll Status:
Der Data Link Layer (DLL) Status enthält Statusinformationen zu den einzelnen Ports (A, B und C) eines Slave-Geräts. Es sind vier verschiedene Werte für den DLL-Status möglich:
Status | Beschreibung |
|---|---|
Carrier / Open | Kein Carrier-Signal am Port vorhanden, der Port ist aber offen. |
Carrier / Closed | Kein Carrier-Signal am Port vorhanden und der Port ist geschlossen |
Carrier / Open | Carrier-Signal ist am Port vorhanden und der Port ist offen. |
Carrier / Closed | Carrier-Signal ist am Port vorhanden, der Port ist aber geschlossen. |
EtherCAT-Slave-Gerät Registerkarte "Mailbox":
Wenn das EtherCAT-Slave-Gerät ein oder mehrere Mailbox-Protokolle unterstützt, erscheint die zusätzliche Registerkarte "Mailbox". In diesem Dialog werden die unterstützten Mailbox-Protokolle aufgelistet, und die Konfiguration der Mailbox kann geändert werden.
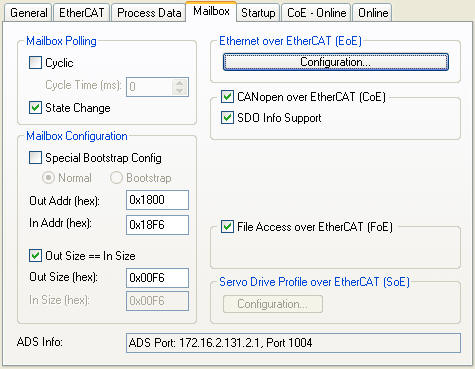
Mailbox Polling:
Zyklisch: Wenn das Kontrollkästchen angewählt ist, liest der Master zyklisch die Mailbox aus.
Zykluszeit (ms): Wenn das Kontrollkästchen „Zyklisch“ angewählt ist, gibt dieser Wert an, wie oft der Master die Mailbox des Slaves ausliest.
Statusänderung: Wenn dieses Kontrollkästchen angewählt ist, überprüft der Master ein Statusbit des Slaves um festzustellen, ob ungelesene Daten in der Mailbox zur Verfügung stehen. Nur dann liest der Master die Mailbox aus. Dieser Modus ist effizienter als der zyklische Modus, weil der Master den Status der Mailboxen mehrerer Slaves mit einem einzigen EtherCAT-Kommando (LRD) überprüfen kann.
CANOpen über EtherCAT(CoE): Wenn dieses Kontrollkästchen angewählt ist, unterstützt der Slave das Mailbox-Protokoll "CANopen over EtherCAT (CoE)".
SDO Info Support: Wenn dieses Kontrollkästchen angewählt ist, kann das Objektverzeichnis des Slave-Gerätes vom Master geladen werden.
Dateizugriff über EtherCAT (FoE): Wenn dieses Kontrollkästchen angewählt ist, unterstützt der Master das Mailbox-Protokoll "File access over EtherCAT (FoE)".
Servo Drive over EtherCAT(SoE): Wenn dieses Kontrollkästchen angewählt ist, unterstützt der Slave das Mailbox-Protokoll "Servo Drive over EtherCAT".
Konfiguration..: Öffnet einen Dialog zur Konfiguration des Mailbox-Protokolls "Servo drive over EtherCAT".
ADS Info: ADS-Identifizierung des EtherCAT-Slave-Gerätes. Die ADS Net id entspricht der NetId des EtherCAT-Gerätes, der ADS Port entspricht der festen Adresse des EtherCAT-Gerätes (siehe EtherCAT Addr). Mit Hilfe von ADS können Sie mit der Mailbox des Slave-Gerätes kommunizieren (zum Beispiel SDO Upload Request).
Registerkarte EtherCAT-Slave-Gerät "CoE-Online":
Wenn das EtherCAT-Slave-Gerät ein oder mehrere CANopen over EtherCAT(CoE)-Protokolle unterstützt, erscheint die zusätzliche Registerkarte "CoE-Online". Diese Registerkarte ermöglicht es dem Benutzer, den Inhalt des Objektverzeichnisses des Slaves (SDO-Upload) einzusehen und den Inhalt eines Objekts im Verzeichnis zu ändern (SDO-Upload).
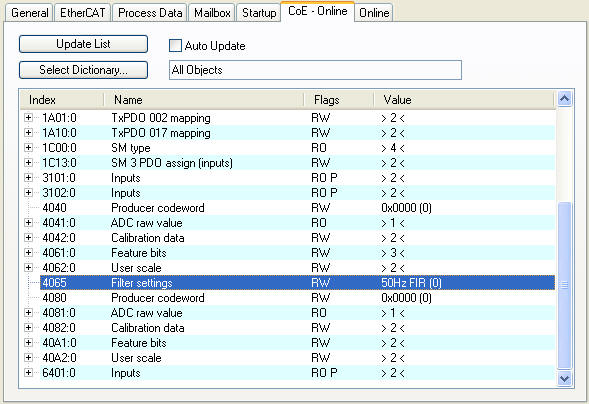
Objekt Listenansicht:
Spalte | Beschreibung | |
|---|---|---|
Index | Index und Subindex des Objekts. | |
Name | Name des Objekts. | |
Flags | RW | Das Objekt kann ausgelesen werden, und es können Daten in das Objekt geschrieben werden. |
RO | Das Objekt kann ausgelesen werden, aber es ist nicht möglich, Daten in das Objekt zu schreiben. | |
P |
| |
Wert | Wert des Objekts. | |
Update List: Aktualisiert alle in der Listenansicht angezeigten Objekte.
Auto Update: Wenn dieses Kontrollkästchen aktiviert ist, wird der Inhalt der Objekte automatisch aktualisiert.
Select Dictionary...: Öffnet den Dialog Select Dictionary. Hier kann man festlegen, welche Objekte in der Listenansicht angezeigt werden.
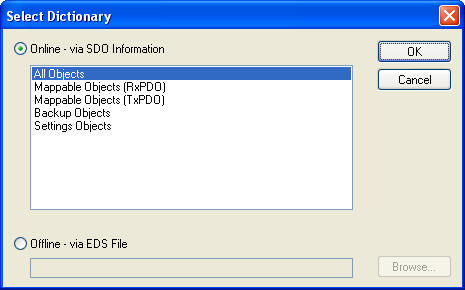
Online - via SDO Information: Wenn dieses Kontrollkästchen angewählt ist, wird die Liste der im Objektverzeichnis des Slaves enthaltenen Objekte vom Slave über SDO-Informationen hochgeladen. In der Listenansicht unten kann man angeben, welche Art von Objekten hochgeladen werden soll.
Offline - via EDS-Datei: Wenn dieses Kontrollkästchen angewählt ist, wird die Liste der im Objektverzeichnis enthaltenen Objekte aus einer vom Benutzer bereitgestellten EDS-Datei gelesen.
EtherCAT-Slave-Gerät Registerkarte "Startup":
Die Registerkarte "Startup" wird angezeigt, wenn das Slave-Gerät über eine Mailbox verfügt und entweder das Protokoll CANopen over EtherCAT(Coe) oder das Protokoll Servo Drive over EtherCAT(SoE) unterstützt. Mit Hilfe der Registerkarte "Startup" kann der Benutzer sehen, welche Download-Anforderungen beim Start an die Mailbox gesendet werden. Es ist auch möglich, neue Mailboxanfragen in die Listenansicht aufzunehmen. Die Download-Anforderungen werden in der gleichen Reihenfolge an den Slave gesendet, wie sie in der Listenansicht angezeigt werden.
Spalte | Beschreibung |
|---|---|
Transition | Übergang gesendete Anfrage. Dies kann entweder Pre-Operational bis Safe-Operational (PS) oder Safe-Operational bis Operational (SO) sein. Wenn der Übergang in "<>" eingeschlossen ist (z. B. <PS>), ist die Mailbox-Anfrage fest und kann vom Benutzer nicht geändert oder gelöscht werden. |
Protokoll | Mailbox Protokoll. |
Index | Index des Objekts. |
Daten | Daten, die auf das Objekt heruntergeladen werden. |
Kommentar | Beschreibung der an die Mailbox gesendeten Anfrage. |
Nach oben: Bewegt die markierte Anfrage in der Liste um eine Position nach oben.
Nach unten: Bewegt die markierte Anfrage in der Liste um eine Position nach unten.
Neu..: Fügt der Liste eine neue Mailbox-Download-Request hinzu, die während des Starts gesendet werden soll.
Löschen...: Löscht das ausgewählte Element
Bearbeiten...: Editiert eine existierende Anfrage.