MC_StepAbsoluteSwitch

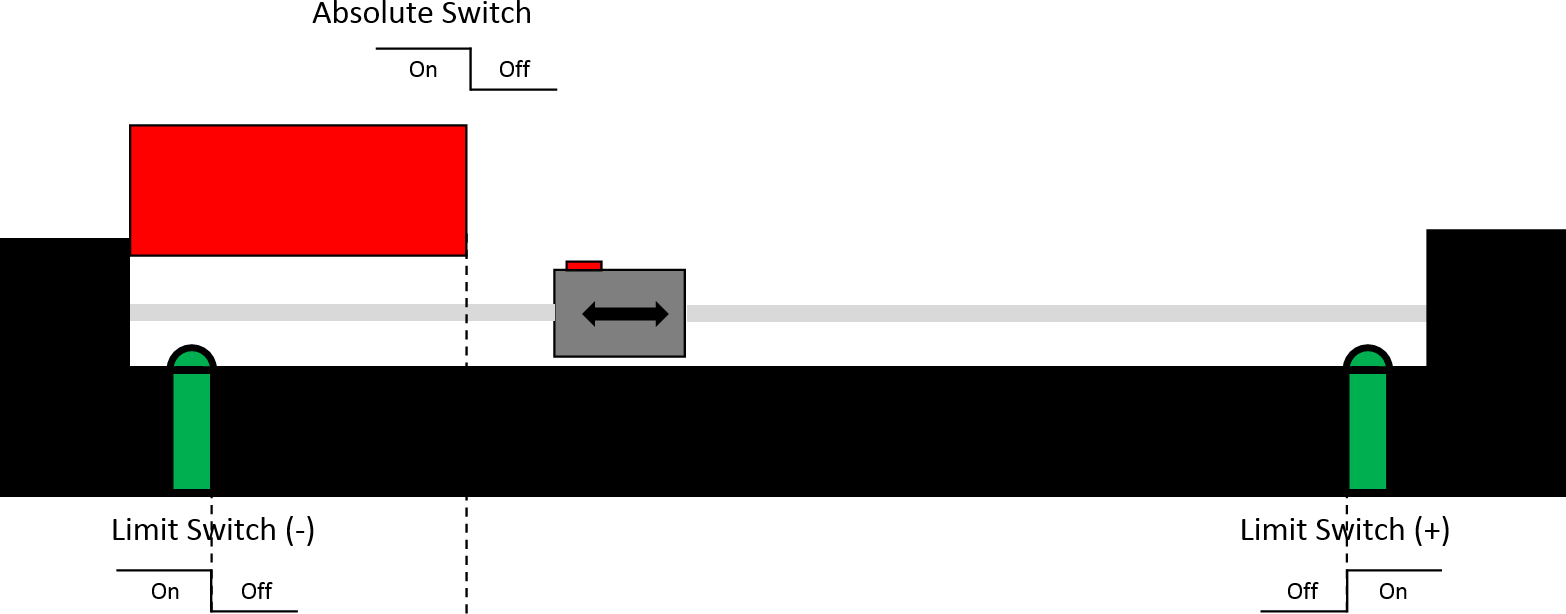
Dieser Funktionsbaustein führt eine Suche nach einem absolut positionierten externen physischen Schalter durch.
Generell hat ein absoluter Schalter zwei “Off”- und einen “On”-Bereich.
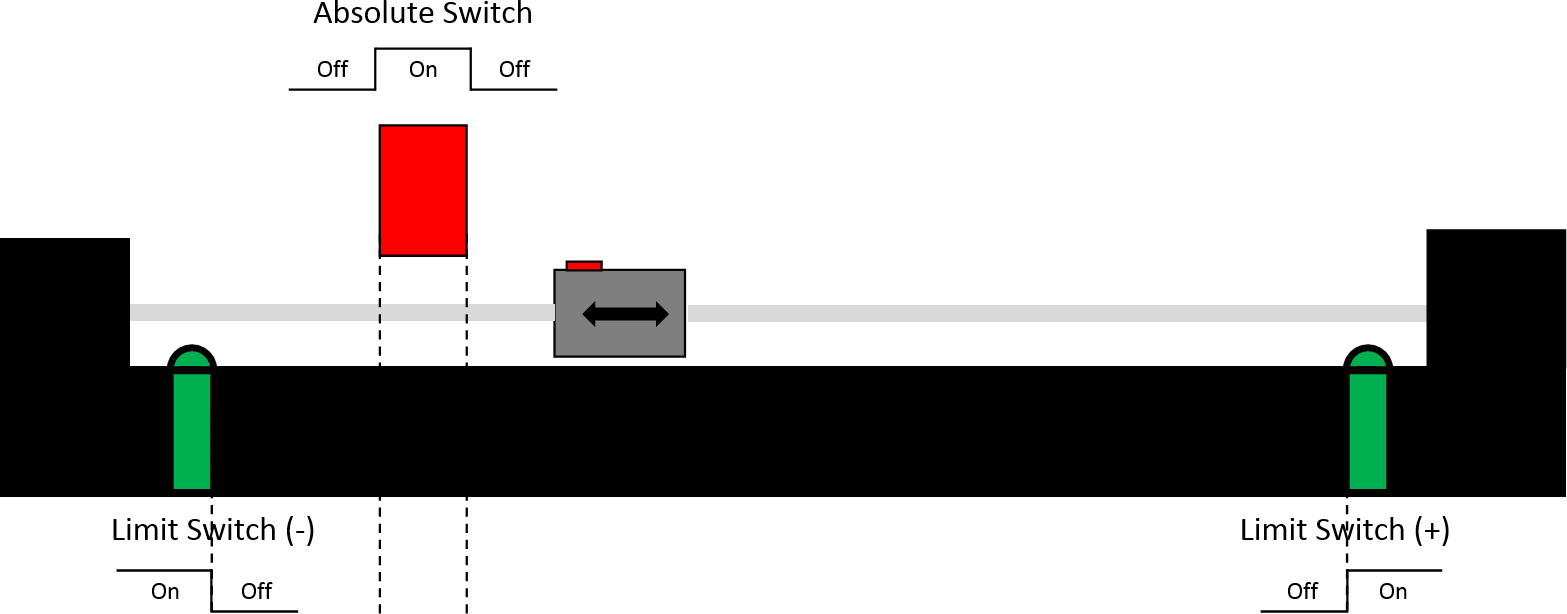
Kann der absolute Schalter nicht überfahren werden, hat dieser nur einen “Off”- und einen “On”-Bereich.
 Eingänge
Eingänge
VAR_INPUT
Execute : BOOL;
Direction : MC_Home_Direction;
SwitchMode : MC_Switch_Mode;
ReferenceSignal : MC_Ref_Signal_Ref;
Velocity : LREAL;
Acceleration : LREAL;
Deceleration : LREAL;
Jerk : LREAL;
SetPosition : LREAL;
TimeLimit : TIME;
DistanceLimit : LREAL;
TorqueLimit : LREAL;
PositiveLimitSwitch : BOOL;
NegativeLimitSwitch : BOOL;
BufferMode : MC_BufferMode;
Options : ST_Home_Options4;
END_VAR Name | Typ | Beschreibung |
|---|---|---|
Execute | BOOL | Mit einer steigenden Flanke am Eingang Execute wird das Kommando ausgeführt. |
Direction | Die Enumeration legt die Startbewegungsrichtung für den Suchvorgang fest. | |
SwitchMode | Die Enumeration legt die Endbedingung für den Suchvorgang fest. | |
ReferenceSignal | Diese Struktur legt die Quelle des Referenznockensignals fest. | |
Velocity | LREAL | Maximale Geschwindigkeit, mit der gefahren werden soll (>0). |
Acceleration | LREAL | Beschleunigung (≥0). Bei einem Wert von 0 wirkt die Standardbeschleunigung aus der Achskonfiguration. |
Deceleration | LREAL | Verzögerung (≥0). Bei einem Wert von 0 wirkt die Standardverzögerung aus der Achskonfiguration. |
Jerk | LREAL | Ruck (≥0). Bei einem Wert von 0 wirkt der Standardruck aus der Achskonfiguration. |
SetPosition | LREAL | Positionswert, auf den die Achsposition gesetzt werden soll. |
TimeLimit | TIME | Ein Überschreiten der Zeit führt zum Abbruch des Suchvorgangs. |
DistanceLimit | LREAL | Ein Überschreiten dieser Distanz bezogen auf die Startposition führt zum Abbruch des Suchvorgangs. |
TorqueLimit | LREAL | Das Drehmoment des Motors wird auf diesen Wert, bezogen auf den möglicherweise im Antrieb parametrierten Gewichtsausgleich, begrenzt, um mechanischen Beschädigungen vorzubeugen. |
PositiveLimitSwitch | BOOL | Signal des Hardwareendschalters in logisch positiver Bewegungsrichtung (PositiveLimitSwitch = FALSE im zulässigen Verfahrbereich). |
NegativeLimitSwitch | BOOL | Signal des Hardwareendschalters in logisch negativer Bewegungsrichtung (NegativeLimitSwitch = FALSE im zulässigen Verfahrbereich). |
BufferMode | MC_BufferMode | Nicht implementiert. |
Options | DisableDriveAccess: Bei Beckhoff-Antrieben auf FALSE, für Fremdantriebe gewöhnlich auf TRUE zu setzen (siehe Info). EnableLagErrorDetection: Bei den Step-Funktionen wird die Schleppfehlerüberwachung abgeschaltet, um einen reibungslosen Referenziervorgang zu gewährleisten. Sollte es bei einer Anwendung sinnvoll sein, die Schleppfehlerüberwachung aktiv zu behalten, kann dies über das Setzen dieses Flags erreicht werden. |
 | Wenn DisableDriveAccess = TRUE ist, ist der Anwender selbst dafür verantwortlich, benötigte Antriebsparameter zu modifizieren und zu rekonstruieren. Die für die angestrebte Homing-Sequenz benötigten Parameter sind mit dem Hersteller des Fremdantriebes abzustimmen. |
/ Ein-/Ausgänge
Ein-/Ausgänge
VAR_IN_OUT
Axis : AXIS_REF;
Parameter : MC_HomingParameter;
END_VARName | Typ | Beschreibung |
|---|---|---|
Axis | Achsdatenstruktur vom Typ AXIS_REF, welche eine Achse eindeutig im System adressiert. Sie enthält unter anderem den aktuellen Status der Achse, wie Position, Geschwindigkeit oder Fehlerzustand. | |
Parameter | MC_HomingParameter | Datenstruktur vom Typ MC_HomingParameter, die über die gesamte Homing-Sequenz von Funktionsbaustein zu Funktionsbaustein übergeben werden muss. |
Ausgänge
VAR_OUTPUT
Done : BOOL;
Busy : BOOL;
Active : BOOL;
CommandAborted : BOOL;
Error : BOOL;
ErrorID : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
Done | BOOL | Wird TRUE, wenn das Kommando erfolgreich beendet wurde. |
Busy | BOOL | Der Busy-Ausgang wird TRUE, sobald das Kommando mit Execute gestartet wird, und bleibt TRUE, solange der Befehl abgearbeitet wird. Wenn Busy wieder FALSE wird, so ist der Funktionsbaustein bereit für einen neuen Auftrag. Gleichzeitig ist einer der Ausgänge Done, CommandAborted oder Error gesetzt. |
Active | BOOL | Zeigt an, dass das Kommando ausgeführt wird. |
CommandAborted | BOOL | Wird TRUE, wenn das Kommando nicht vollständig ausgeführt werden konnte. |
Error | BOOL | Wird TRUE, sobald ein Fehler eintritt. |
ErrorID | UDINT | Liefert bei einem gesetzten Error-Ausgang die Fehlernummer. |