MC_TorqueControl

Mit dem Funktionsbaustein MC_TorqueControl wird eine Achse NC geführt in den „Cyclic Synchronous Torque Mode“ (CST) geschaltet und gibt dieser einen Torque-Sollwert vor. In dieser Betriebsart stellt die NC ebenfalls die parametrierten „VelocityLimitHigh“ & „VelocityLimitLow“ als verknüpfbare Objekte im zyklischen Interface zum Antriebsregler zur Verfügung (Axis->Drive->Outputs->nDataOut5/nDataOut6).
Für eine ruckfreie Umschaltung der Betriebsart, ist die Totzeitkompensation in der NC-Achse zu aktivieren.
Unterstützte Beckhoff Hardware | ||
|---|---|---|
AX5xxx | AX8xxx / AMP8xxx / MD8xxx | Kompakte Antriebstechnik (Servo) |
|
|
|
 ab FW v2.14 b0001
ab FW v2.14 b0001
| |
Lebensgefahr oder Gefahr von schweren Verletzungen oder Sachschäden durch unbeabsichtigte Bewegungen der Achse Bei Verwendung des Funktionsbausteins wird die Achse in den CST-Mode geschaltet. Nach Verwendung des Funktionsbausteins (insbesondere nach Fehlersituationen), kann es dazu kommen, dass sich die Achse weiterhin im CST-Mode befindet. Dieses kann beim Freigeben der Achse zu plötzlichen und ungeplanten Bewegungen (insbesondere bei Hubachsen) führen.
|

Damit dieser Baustein sinnvoll verwendet werden kann, muss der Antriebsregler ein „fliegendes“ Umschalten der Betriebsarten sowie eine Drehzahlbegrenzung im Torque-Mode unterstützen.
Für die Skalierung des Ist- und Soll-Torque stehen unter den Parametern der Nc-Achse im Bereich Drive entsprechende Parameter zur Verfügung.
 Eingänge
Eingänge
VAR_INPUT
Execute : BOOL;
ContinuousUpdate : BOOL;
Relative : BOOL;
Torque : LREAL;
TorqueRamp : LREAL;
VelocityLimitHigh : LREAL;
VelocityLimitLow : LREAL;
BufferMode : MC_BufferMode;
Options : ST_TorqueControlOptions;
END_VARName | Typ | Beschreibung |
|---|---|---|
Execute | BOOL | Mit einer steigenden Flanke wird das Kommando ausgeführt. |
ContinuousUpdate | BOOL | Ist dieser Eingang TRUE bei der steigenden Flanke am Eingang „Execute“, so können während der Abarbeitung des Kommandos die Eingänge „Torque“, „TorqueRamp“, „VelocityLimitHigh“ und „VelocityLimitLow“ verändert und schnellstmöglich zur Wirkung gebracht werden. |
Relative | BOOL | Ist dieser Eingang TRUE, wird der Torque-Wert relativ um den angegebenen Wert „Torque“ verändert. |
Torque | LREAL | Drehmomentsollwert, mit dem der Antrieb betrieben („Relative“ = FALSE), bzw. um den das Drehmoment verändert werden soll („Relative“ = TRUE). (z. B. %) Hierbei bedeutet eine positiver Torque-Vorgabe, Torque in logisch positive Bewegungsrichtung. |
TorqueRamp | LREAL | Änderungsgeschwindigkeit des Drehmomentsollwertes ( z. B. %/s) |
VelocityLimitHigh | LREAL | Oberes Geschwindigkeitslimit zur Begrenzung im CST-Mode (z. B. mm/s). Diese Limitierung muss entsprechend im Prozessabbild konfiguriert werden. |
VelocityLimitLow | LREAL | Unteres Geschwindigkeitslimit zur Begrenzung im CST-Mode (z. B. mm/s). Diese Limitierung muss entsprechend im Prozessabbild konfiguriert werden. |
BufferMode | Es wird nur „Aborting“ unterstützt. | |
Options | Datenstruktur, die zusätzliche, selten benötigte Parameter enthält. Im Normalfall kann der Eingang offen bleiben. |
Siehe auch: Allgemeine Regeln für MC-Funktionsbausteine
 Ein-/Ausgänge
Ein-/Ausgänge
VAR_IN_OUT
Axis : AXIS_REF;
END_VARName | Typ | Beschreibung |
|---|---|---|
Axis | Achsdatenstruktur, welche eine Achse eindeutig im System adressiert. Sie enthält unter anderem den aktuellen Status der Achse, wie Position, Geschwindigkeit oder Fehlerzustand. |
 Ausgänge
Ausgänge
VAR_OUTPUT
InTorque : BOOL;
Busy : BOOL;
Active : BOOL;
CommandAborted : BOOL;
Error : BOOL;
ErrorID : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
InTorque | BOOL | TRUE, wenn die Achse das Solldrehmoment aufgebaut hat und keine Limitirung der Geschwindigkeit aktiv ist. |
Busy | BOOL | TRUE, sobald das Kommando mit Execute gestartet wird und solange das Kommando abgearbeitet wird. Wenn „Busy“ FALSE ist, ist der Funktionsbaustein bereit für einen neuen Auftrag. |
Active | BOOL | Zeigt an, dass der Funktionsbaustein die Achse kontrolliert. |
CommandAborted | BOOL | TRUE, wenn das Kommando nicht vollständig ausgeführt werden konnte. |
Error | BOOL | TRUE, wenn ein Fehler auftritt. |
ErrorID | UDINT | Liefert bei einem gesetzten Error-Ausgang die Fehlernummer. |
Siehe auch: Allgemeine Regeln für MC-Funktionsbausteine
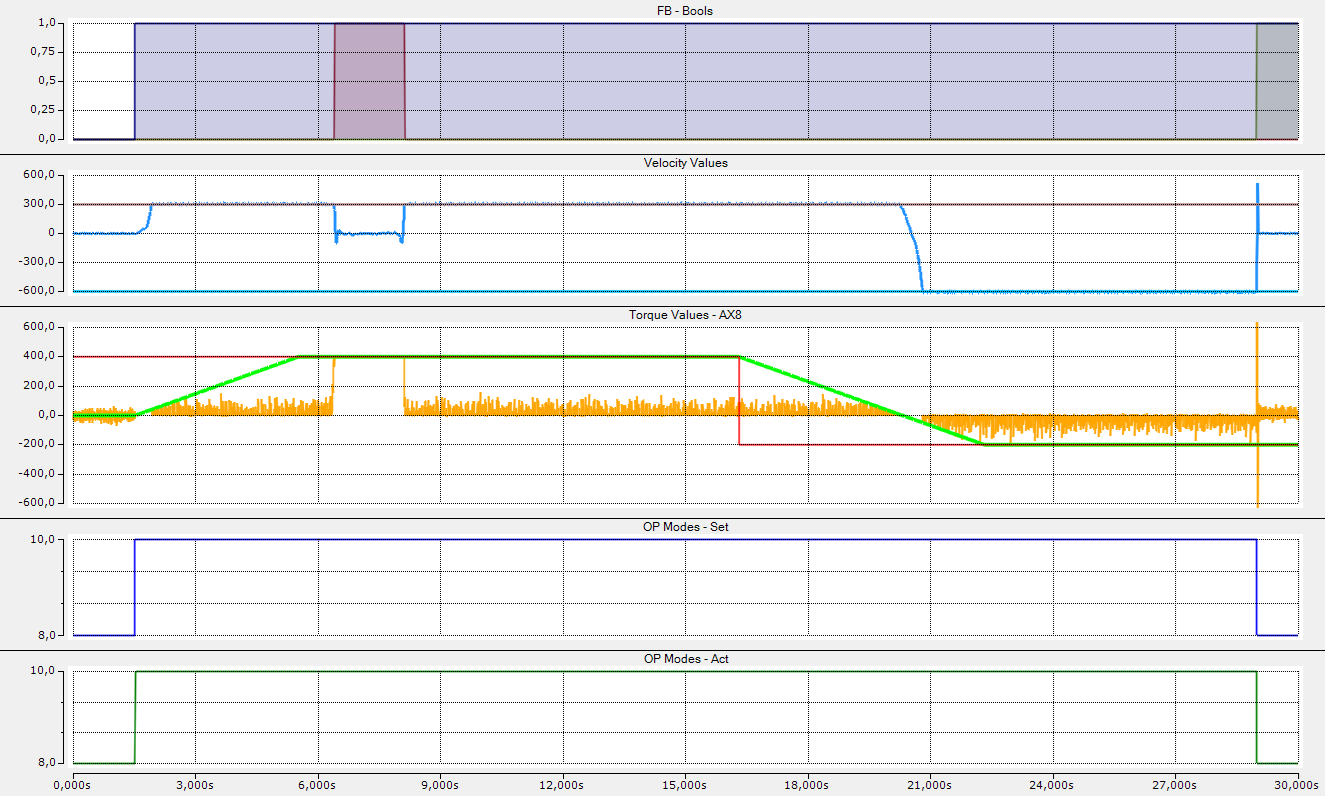
Beispiel MC_TorqueControl beim AX8xxx
VAR
Axis_Main : AXIS_REF;
bExecute_TorqueControl : BOOL;
fTorque : LREAL;
END_VARfTorque := 35;
fbTorqueControl(
Axis := Axis_Main,
Execute := bExecute_TorqueControl,
ContinuousUpdate := TRUE,
Relative := FALSE,
Torque := fTorque,
TorqueRamp := 10,
VelocityLimitHigh := 400,
VelocityLimitLow := -500,
BufferMode := ,
Options := ,
InTorque => ,
Busy => ,
Active => ,
CommandAborted => ,
Error => ,
ErrorId => );
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS-Bibliothek |
|---|---|---|
TwinCAT v3.1.4024 | PC oder CX (x86) | Tc2_MC2 |