Regleroptimierung
Die Parameter der Regelkreise werden beim Scannen des Motors grundlegend voreingestellt. Bei der Regleroptimierung werden die Parameter optimiert.
Ziele der Regleroptimierung:
- Ist-Position an Soll-Position angleichen: Schleppfehler minimieren.
- Ist-Geschwindigkeit an Soll-Geschwindigkeit angleichen.
- Überschwingen und Unterschwingen reduzieren.
Beobachten Sie während der Regleroptimierung die „Torque actual value“. So können Sie frühzeitig erkennen, ob das System zu Schwingungen neigt.
Vorbereitung
- Voraussetzung: der Testlauf wurde erfolgreich durchgeführt.
- 1. Lastverhältnisse wie in der realen Anwendung herstellen.
Eine Regleroptimierung ohne Last ist nicht sinnvoll, da der Motor in diesem Fall ein anderes Verhalten aufweist. - 2. Ggf. den zulässigen Schleppfehler erhöhen. Siehe Kapitel CSP (Positionsregelung).
- 3. TwinCAT-Konfiguration aktivieren.
- 4. In TwinCAT ein Scope-Projekt anlegen.
- 5. Folgende Variablen über den „Target browser“ auswählen, um sie im Scope anzeigen zu lassen:
Position Lag
0x1A03 Torque actual value
Aus der TwinCAT NC:
Position Sollwert
Position Istwert
Geschwindigkeit Sollwert
Geschwindigkeit Istwert - 6. Im Solution Explorer die Achse anklicken.
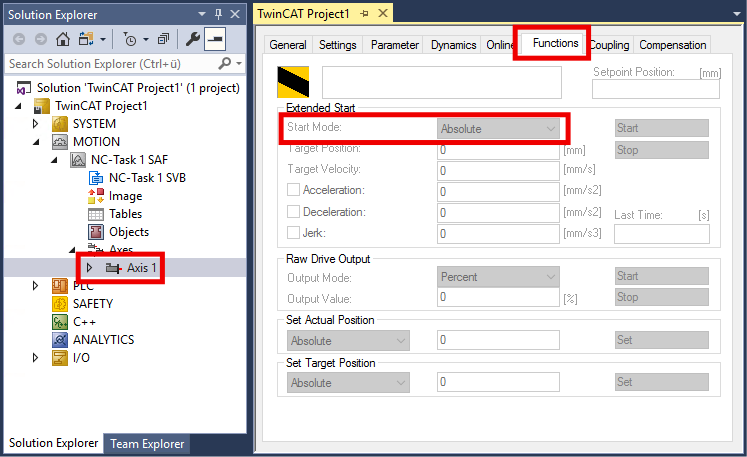
- 7. Karteireiter „Functions“ anklicken.
- 8. Im Drop-Down-Menü „Start Mode“: „Reversing Sequence“ auswählen.
- 9. Dynamik und Geschwindigkeit so einstellen wie in der realen Anwendung benötigt.
Die weitere Vorgehensweise ist abhängig davon, welches Feedback angeschlossen und konfiguriert ist:
- Kein Feedback, sensorloser Betrieb
- Nur Hall-Sensoren
- Ein Inkremental-Encoder und optional Hall-Sensoren
Weiterführende Informationen