TcCOM objects
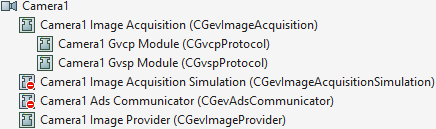
Each GigE Vision camera instance contains a number of TcCOM objects in the TwinCAT project:
 | TcCOM objects automatically managed by TwinCAT Vision TcCOM objects are always managed automatically by TwinCAT Vision and do not have to be adapted or configured manually. Therefore the following information essentially serves to provide a more comprehensive technical understanding. |
| Cyclic tasks The TcCOM objects |
GigE Vision Image Acquisition
The GevImageAcquisition object coordinates the communication with a GigE Vision camera. It consolidates and manages two sub-objects that implement the two protocols of the GigE Vision standard:
- GigE Vision Control Protocol (GVCP)
- GigE Vision Streaming Protocol (GVSP)
Diagnostic information on the camera communication can be found on the Parameter (Online) tab of the two sub-objects.
It also uses a UDP/IP stack on an appropriate network adapter to communicate with a GigE Vision camera. Diagnostic information can also be retrieved in these objects. Details on both diagnostic options can be found in the Appendix/Troubleshooting at Camera communication.
The RT-Ethernet adapters and IP stacks can be found in the TwinCAT project under the I/O node:
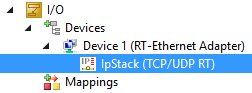
Image acquisition and the two protocols (GVCP and GVSP) are parameterized in the Configuration Assistant in the configuration tree. A description of the parameters can be found in Chapter TcCOM parameters. This object is deactivated when camera simulation is active.
GigE Vision Image Acquisition simulation
The GevImageAcquisitionSimulation object simulates the streaming behavior of a GigE Vision camera and is deactivated by default. If the simulation mode is active, the GevImageAcquisition object is deactivated instead.
ActivateBlockIDCorrection | This setting can be used to specify that artificially generated continuous block IDs should be used instead of original IDs. Default: disabled |
GigE Vision Ads Communicator
The GevAdsCommunicator object is required when recording a camera stream. It sends corresponding images from the router memory to the TwinCAT Vision service via ADS. In contrast to saving images via the function block FB_VN_WriteImage, a separate TcCOM object is required for the record functionality, since the recording runs independently of the PLC processing.
In Config mode, a further instance of the GevAdsCommunicator module is used so that all Camera Assistants can communicate with the camera.
PublishImages | With this setting, the Ads Communicator sends every nth image to the TwinCAT Vision service. This setting is automatically set when activating a stream recording and depends on the Image Offset parameter on the Record/Playback tab. It should not be set manually. Default: 0 |
GigE Vision Image Provider
The GevImageProvider object represents the interface between a camera and corresponding function blocks in the PLC. These include FB_VN_GevCameraControl, FB_VN_SimpleCameraControl, FB_VN_ReadRegister and FB_VN_WriteRegister, and FB_VN_ReadMemory and FB_VN_WriteMemory. To this end, the object in the Symbol Initialization tab of the project instance must be linked with the desired PLC symbols of the function blocks. If several camera instances exist in the project, ensure that the correct GevImageProvider module is selected based on the name.
ImageQueueSize | Number of acquired images that are to be buffered if they are not accepted directly by the function block in the PLC. Default: 1 |
Linking the TcCOM objects
The following overview graphic shows a simplified relationship of the different objects that communicate with one another or retrieve data.
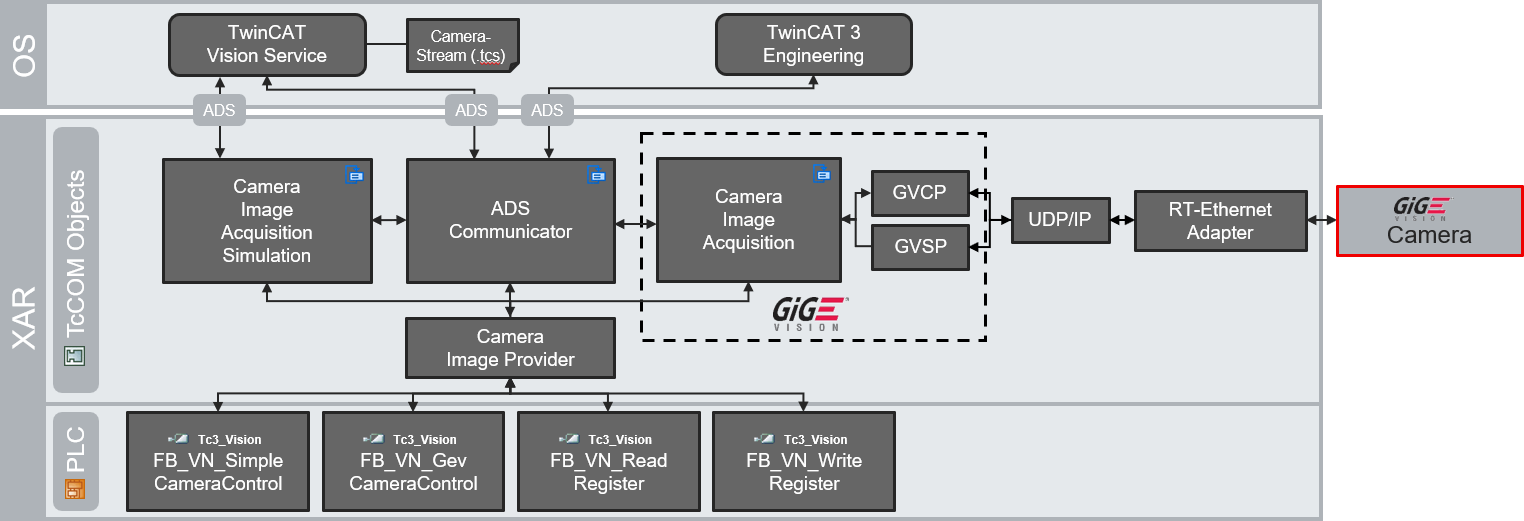 Fig.5: Architecture of the GigE Vision Camera functionality
Fig.5: Architecture of the GigE Vision Camera functionalityThe linking of the TcCOM objects differs depending on the setting of the simulation mode and the Ads Communicator object (see General tab). The corresponding link setting can be found in the Interface Pointer tab of the individual objects. By default, the link is automatically created based on the settings in the Camera Assistant and should not be changed manually. If the links were changed by mistake or the TcCOM objects were added to the camera afterwards, the links can be repaired by clicking Try to fix in the General tab.
 Fig.6: Note on the invalid linking of TcCOM objects
Fig.6: Note on the invalid linking of TcCOM objects