Development environment
TwinCAT Vision is fully integrated in the TwinCAT 3 development environment. Essentially, TwinCAT Vision extends the TwinCAT system by a further node, below which the Vision components can be created and configured. The following configuration elements are used:
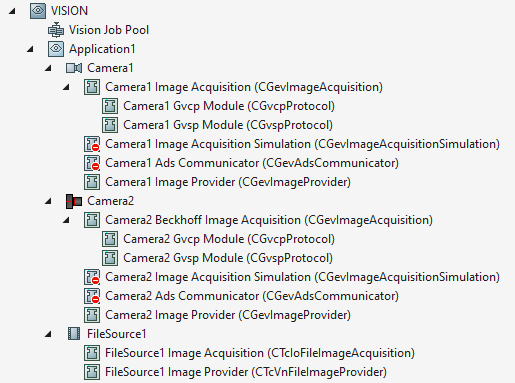
- The VISION node provides general configuration options that affect all Vision components on the system. It includes all other configuration elements.
- The Vision Job Pool can be used to define job tasks for parallel execution of Vision functions. Each system has a single Vision Job Pool.
- An Application node encapsulates several Vision devices (GigE Vision cameras and File Sources) to form an applicative unit. The entire configuration of an application can be exported and imported. Each TwinCAT project can have several applications.
- A GigE Vision camera node contains the configuration of a physical GigE Vision camera. Each application can have several GigE Vision camera nodes.
- A Beckhoff camera node contains the configuration of a physical Beckhoff camera. Each application can have several Beckhoff camera nodes.
- A File Source node contains the configuration for an interface between images on the hard disk of the target system and an image acquisition module within the PLC. Each application can have several File Source nodes.
 | Communication with system components GigE Vision camera nodes, Beckhoff camera nodes and File Source nodes each contain TcCOM modules for communication with various system components. |
Furthermore, the development environment features an ADS Image Watch window element for displaying images from the PLC via ADS. In addition, a general system configuration is necessary for the correct functioning of the Vision components.
In order to be able to display images from the PLC live in a TwinCAT HMI, a corresponding HMI extension is available.