Settings in the CoE register
(Master TwinCAT 2.11 R3)
The data given here serve as an example for a servomotor type AM8131-0F20-0001 from Beckhoff Automation. For other motors the values may vary, depending on the application.
Table of contents |
|---|
Inserting the motor XML file
 | Downloading the EL72x1-xxxx motor XML files The motor XML files are available for download from the Beckhoff website. |
To facilitate commissioning of the EL72x1-xxxx servo terminal, motor XML files are provided for the servomotors that are supported by the EL72x1-xxxx. The XML files can be read in the System Manager.
All CoE parameters and DS402 parameters are then set as required.
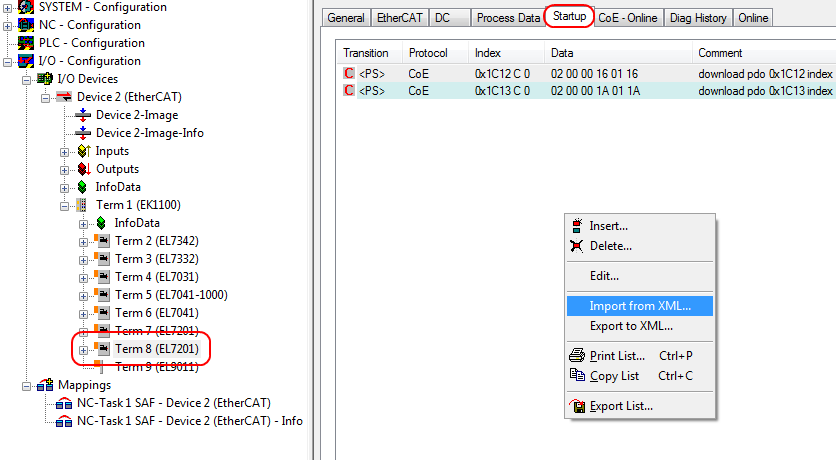
- To read the motor XML file select the EL72x1-xxxx and open the Startup tab. Right-click in the empty field and select Import from XML...(see Fig. Importing the motor XML file).
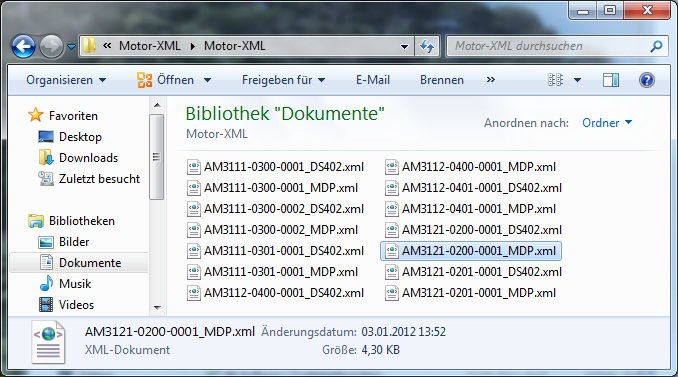
- Select the motor XML file that matches the connected motor (see Fig. Selecting the correct motor XML file)
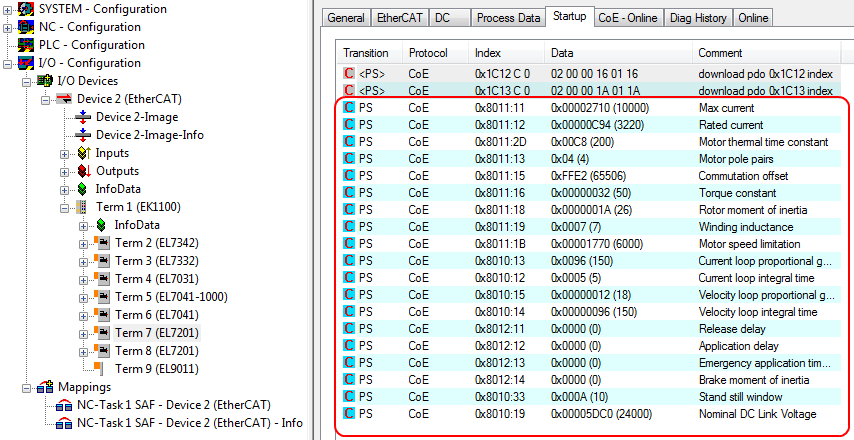
- All required parameters are then set, and the motor can be put into operation (see Fig. CoE parameters of the motor XML file).
| Startup list Any further application-specific settings should also be implemented in the Startup list. Otherwise the modified settings will be overwritten next time the terminal starts up. |
Adaptation of current and voltage
Notice | |
The motor may overheat! In order to prevent overheating of the connected motor, it is important to adjust the voltage of the servo terminal to the actually connected voltage. |
This requires the index 0x8010:19 (0x2002:19, DS402 profile) "Nominal DC Link Voltage" of the connected voltage to be set accordingly
Setting further parameters
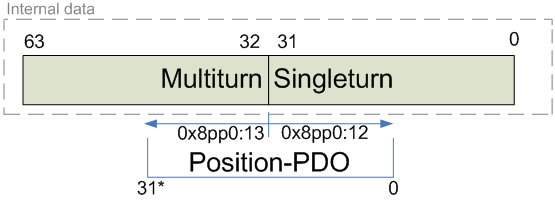
Single-turn Bits (MDP742: Index 0x8000:12 / DS402: Index 0x2010:12) / Multi-turn Bits (MDP742: Index 0x8000:13 / DS402: Index 0x2010:13)
Here the user can specify how many single-turn and multi-turn bits the terminal should display. A total of 32 bits are available. These 32 bits can be subdivided as required.
The standard setting is 20 single-turn bits and 12 multi-turn bits.
Singleturn bits: number of bits relating to the resolution of one rotor rotation.
Multiturn bits: after a rotor rotation the multi-turn bits are incremented by one.
| The motor may overheat! If the number of single-turn bits is changed, the scaling factor in the NC has to be adjusted |
Torque limitation (MDP742: Index 0x7010:0B / DS402: Index 0x6072:0)
Limits the current / torque to this value. The value is specified in 1000th of the rated current.
Integral velocity controller component Tn (MDP742: Index 0x8010:14 / DS402: Index 0x2002:14)
The values specified here are exemplary, although in most cases they have led to excellent results. Depending on the application, other values may yield better results.
- Reduce the value, until the motor starts to oscillate slightly. Then increase the value by 10%.
Proportional velocity controller component Kp (MDP742: Index 0x8010:15 / DS402: Index 0x2002:15)
The values specified here are exemplary, although in most cases they have led to excellent results. Depending on the application, other values may yield better results.
- Increase the value, until the motor starts to oscillate slightly. Then reduce the value by 80%.