Flankengesteuerte Corefunctions
Das Kommando, das von diesen Corefunctions akzeptiert wird, heißt in der Regel bExecute (mit Ausnahme von Power, das weiter unten beschrieben wird).
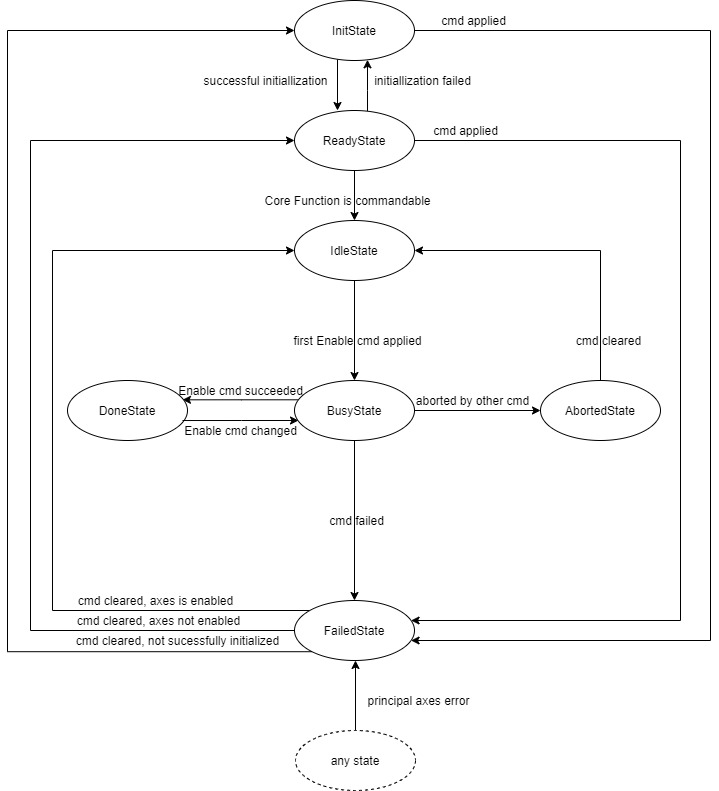
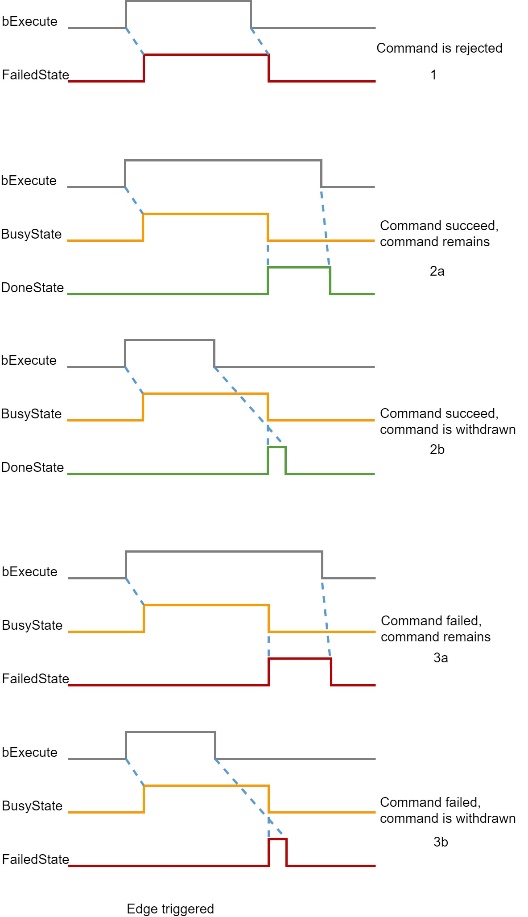
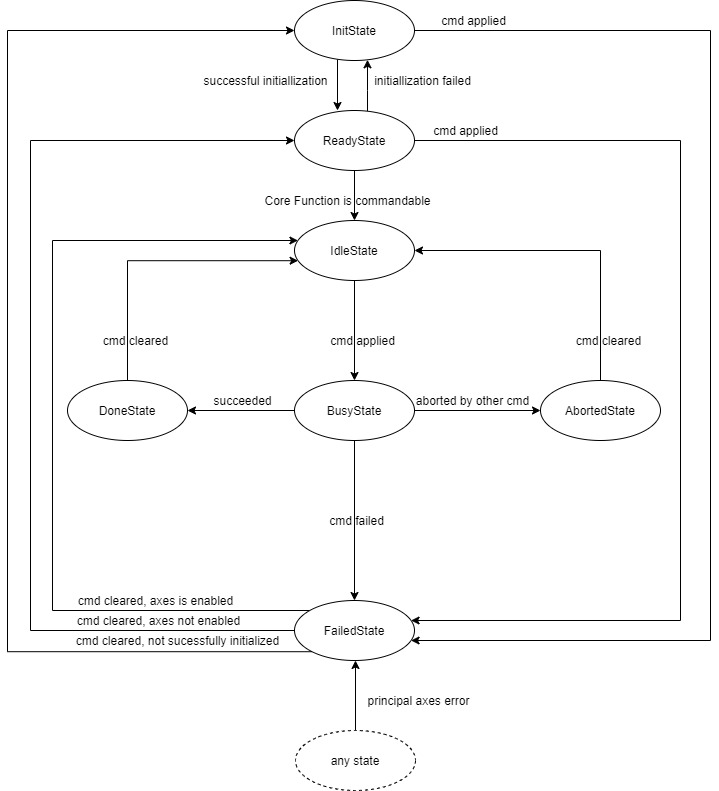
Die steigende Flanke von bExecute löst eine Reihe von Prüfungen aus, um festzustellen, ob die Ausführungsbedingungen erfüllt sind. Wenn die Ausführungsbedingungen nicht erfüllt sind, wird das Kommando abgelehnt und die Corefunction in den FailedState versetzt (Fall 1 in der Abbildung unten). Wenn die Ausführungsbedingungen erfüllt sind, wird das Kommando akzeptiert und die Corefunction geht in den BusyState über. Die fallende Flanke von bExecute löst nicht direkt eine Antwort im BusyState aus (Fall b unten). Wenn das Kommando erfolgreich ausgeführt wurde, geht die Corefunction in den Zustand DoneState über (Fall 2 unten), andernfalls in den Zustand FailedState (Fall 3 unten). Zu diesem Zeitpunkt wird geprüft, ob bExcute noch TRUE ist und der Zustand der Corefunction im nächsten SPS-Zyklus geändert. Der Zustandsübergang ist in der nachstehenden Abbildung dargestellt.
Die folgenden Funktionen sind flankengesteuerte Corefunctions:
Corefunction | Beschreibung |
|---|---|
Wird verwendet, um die Soft-Endschalter der Achse vorübergehend zu deaktivieren und wieder zu aktivieren. | |
Bietet eine Reihe von Homing-Methoden. | |
Dient zur Aktivierung und Deaktivierung der Achse. | |
Wird verwendet, um Multisegment-PTP-Bewegungen durchzuführen. | |
Wird verwendet, um den Fehlerzustand von Achsen und Geräten zurückzusetzen. | |
Wird verwendet, um die Istposition der Achse zu ändern. | |
Kommando für Not-Aus unter Verwendung der maximalen dynamischen Parameter, um die Achse anzuhalten. | |
Kommando für Stopp mit den dynamischen Standardparametern zum Anhalten der Achse. | |
Wird verwendet für das Referenzieren von analogen Gebersystemen. | |
Wird verwendet für das Referenzieren von analogen Gebersystemen. Wird im Anschluss an TeachPosition verwendet, um die gemessenen Werte zu verrechnen. | |
Eine spezielle Corefunction für Aktuatoren. Sie wird verwendet für die automatische Optimierung wie beispielsweise Bewegungszeit-Vermessung. |
Timing Digram
State-Machine
Ausnahmefall: Power
 | Power hat eine abweichende Verhaltensweise Obwohl Power eine flankengesteuerte Corefunction ist, heißt das Kommando für Power |