FB_BA_MotMdlt
Das Template dient der Ansteuerung eines Drehzahl-geregelten Motors.
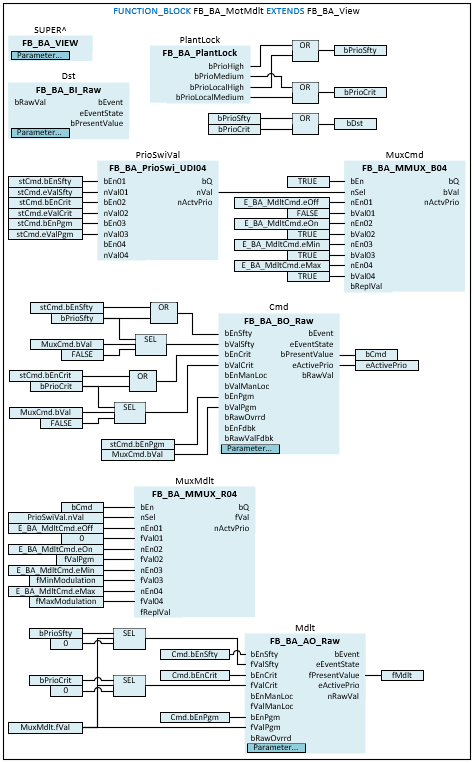
Es besteht im Wesentlichen aus einem BO- und AO-Objekt für die Ansteuerung des Motors (Frequenzumformer) und einem BI-Objekt zur Anzeige einer Störung. Der Funktionsbaustein PlantLock sammelt alle sicherheitsrelevanten Störungen. Über die Kommandostruktur stCmd werden dem Template die Freigaben und Modulationsbefehle übermittelt
 | Die Initialisierung des Templates erfolgt innerhalb der Methode FB_Init. |
Blockschaltbild
Syntax
FUNCTION_BLOCK FB_BA_MotCtl EXTENDS FB_BA_View
VAR_INPUT
stCmd : ST_BA_Mdlt;
fValPgm : REAL;
END_VAR
VAR_INPUT CONSTANT
Dst : FB_BA_BI_Raw;
Cmd : FB_BA_BO_Raw;
Mdlt : FB_BA_AO_Raw;
PlantLock : FB_BA_PlantLock;
END_VAR
VAR_INPUT CONSTANT PERSISTENT
{attribute 'parameterCategory' := 'Behaviour'}
fMinModulation : REAL := 20;
{attribute 'parameterCategory' := 'Behaviour'}
fMaxModulation : REAL := 100;
END_VAR
VAR_OUTPUT
bCmd : BOOL;
fMdlt : REAL;
bDst : BOOL;
eActivePrio : E_BA_Priority;
END_VAR
VAR
bPrioSfty : BOOL;
bPrioCrit : BOOL;
PrioSwiVal : FB_BA_PrioSwi_UDI04;
MuxCmd : FB_BA_MMUX_B04;
MuxMdlt : FB_BA_MMUX_R04;
END_VAR Eingänge
Eingänge
Name | Typ | Beschreibung |
|---|---|---|
stCmd | Über die Kommandostruktur stCmd werden dem Template die Freigaben und Modulationsbefehle übermittelt. Das Kommando mit der höchsten Priorität bestimmt am Binär-Ausgangs-Objekt Cmd den Schaltbefehl and am Analog-Ausgabe-Objekt Mdlt den Stellbefehl. | |
fValPgm | REAL | Stellwert für die Ansteuerung des Motors. |
 Eingänge CONSTANT
Eingänge CONSTANT
Name | Typ | Beschreibung |
|---|---|---|
Dst | Binär-Eingangs-Objekt dient der Verarbeitung einer Störung. | |
Cmd | Das Multistate-Ausgabe-Objekt dient der Ausgabe des aktuellen Schaltwertes. | |
Mdlt | Aktueller Wert des Analog-Output-Objektes. | |
PlantLock | Der Funktionsbaustein PlantLock sammelt alle sicherheitsrelevanten Störungen auf dieser Ebene der Projektstruktur und löst dementsprechend Schaltbefehle im Template aus. |
Eingänge CONSTANT PERSISTENT
Name | Typ | Beschreibung |
|---|---|---|
fMinModulation | REAL | Konstanter minimaler Wert, welcher ausgegeben wird, wenn der Modulationsbefehl E_BA_MdltCmd.eMin ansteht (siehe E_BA_Mdlt). |
fMaxModulation | REAL | Konstanter maximaler Wert, welcher ausgegeben wird, wenn der Modulationsbefehl E_BA_MdltCmd.eMax ansteht (siehe E_BA_Mdlt). |
 Ausgänge
Ausgänge
Name | Typ | Beschreibung |
|---|---|---|
bCmd | BOOL | Ausgabe des Schaltwertes. |
fMdlt | REAL | Aktueller Wert des Analog-Output-Objektes. |
bDst | BOOL | Die Variable ist eine Auswertung der Lockprioritäten „Safety“ und „Critical“ der Projektstruktur und zeigt ein ausgelöstes Ereignis an. |
eActivePrio | Anzeige der aktiven Priorität. |
Variablen
Name | Typ | Beschreibung |
|---|---|---|
bPrioSfty | BOOL | Die Variable ist eine Auswertung der Lockpriorität „Safety“ der Projektstruktur. |
bPrioCrit | BOOL | Die Variable ist eine Auswertung der Lockpriorität „Critical“ der Projektstruktur. |
bPrioSwiVal | Der Prioritätenschalter PrioSwiVal ermittelt anhand der Kommandostruktur stCmd den Modulationsbefehl für die Multiplexer MuxCmd und MuxMdlt. | |
MuxCmd | Der Multiplexer MuxCmd ermittelt den aktuellen Schaltwert aus der Kommandierung des Prioritätenschalters PrioSwiVal. Das resultierende Ergebnis wird an das Binär-Ausgangs-Objekt Cmd übermittelt. | |
MuxMdlt | Der Multiplexer MuxMdlt ermittelt den aktuellen Stellwert aus den Modulationswerten Ctrl.fPresentValue, fMin, fMax und dem Modulationsbefehl des Prioritätenschalters PrioSwiVal. Das resultierende Ergebnis wird an das Analog-Ausgangs-Objekt Mdlt übermittelt. |