Entwicklungsumgebung
TwinCAT Vision ist vollständig in die TwinCAT 3 Entwicklungsumgebung integriert. Im Wesentlichen erweitert TwinCAT Vision das TwinCAT System um einen weiteren Knoten, untern dem die Vision-Komponenten angelegt und konfiguriert werden können. Dabei werden folgende Konfigurationselemente verwendet:
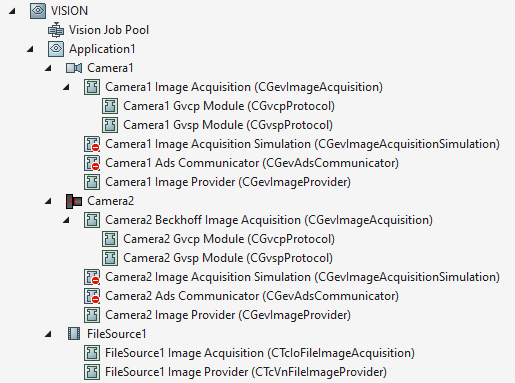
- Der VISION Knoten bietet allgemeine Konfigurationsmöglichkeiten, die alle Vision-Komponenten auf dem System betreffen, und enthält sämtliche weiteren Konfigurationselemente.
- Im Vision Job Pool können verfügbare Job-Tasks zur parallelisierten Ausführung von Vision-Funktionen festgelegt werden. Jedes System besitzt einen einzigen Vision Job Pool.
- Ein Application Knoten kapselt mehrere Vision-Geräte (GigE Vision Kameras und File Sources) zu einer applikativen Einheit. Die gesamte Konfiguration einer Applikation kann exportiert und importiert werden. Jedes TwinCAT Projekt kann mehrere Applikationen haben.
- Ein GigE Vision Kamera Knoten enthält die Konfiguration einer physischen GigE Vision Kamera. Jede Applikation kann mehrere GigE Vision Kamera Knoten haben.
- Ein Beckhoff-Kamera-Knoten enthält die Konfiguration einer physischen Beckhoff-Kamera. Jede Applikation kann mehrere Beckhoff-Kamera-Knoten haben.
- Ein File Source Knoten enthält die Konfiguration für eine Schnittstelle zwischen Bildern auf der Festplatte des Zielsystems und einem Bild-Akquisitions-Modul innerhalb der SPS. Jede Applikation kann mehrere File Source Knoten haben.
 | Kommunikation mit System-Komponenten GigE Vision-Kamera-Knoten, Beckhoff-Kamera-Knoten und File Source-Knoten enthalten jeweils TcCOM-Module zur Kommunikation mit verschiedenen System-Komponenten. |
Des Weiteren existiert in der Entwicklungsumgebung das Fensterelement ADS Image Watch zur Anzeige von Bildern aus der SPS per ADS. Außerdem ist für die korrekte Funktionsweise der Vision-Komponenten eine generelle Systemkonfiguration notwendig.
Um Bilder aus der SPS live in einer TwinCAT HMI anzeigen zu können, steht eine entsprechende HMI-Erweiterung zur Verfügung.