Konfiguration
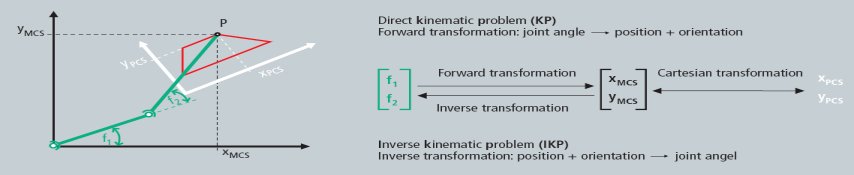
Basierend auf PLCopen unterscheiden wir zwischen zwei Hauptkoordinatensystemen (siehe Beschreibung Koordinatensysteme):
- Achskoordinatensystem (ACS „Axis Coordinate System“)
- Maschinenkoordinatensystem (MCS „Machine Coordinate System“)
Kinematischen Transformationskanal konfigurieren
- 1. Alle Achsen (ACS und MCS ) zur NC-Konfiguration in der XAE hinzufügen, genau wie PTP-Achsen. Die Achsen des ACS sind Hardwareachsen und werden mit Antrieben verknüpft, die Achsen des Maschinenkoordinatensystem (MCS) sind reine Softwareachsen des Typs Simulationsencoder. Alle ACS - und MCS -Achsen, die in einem kinematischen Transformationskanal verwendet werden, müssen in der XAE erzeugt werden. So hat z.B. ein Delta-Roboter 3 ACS-Achsen (M1...M3) und 3 MCS-Achsen (X, Y, Z).
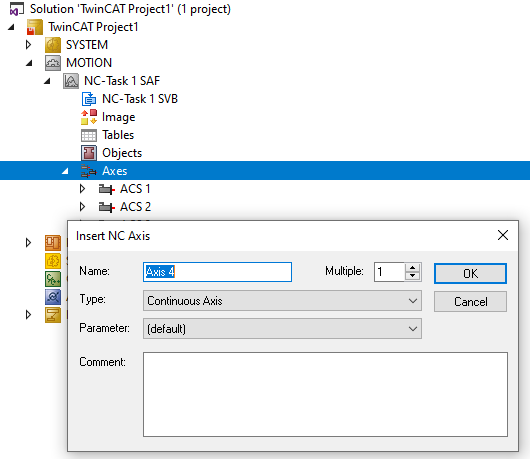
- 2. Dazu auf „Axes“ einen Rechtsklick und „Add new item“ auswählen.
- 3. Dann im Fenster „Insert NC Axis“ die Achsen entsprechend der Kinematik anlegen.
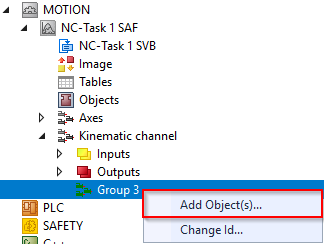
- 4. Einen Kinematikkanal zur XAE Konfiguration hinzufügen.
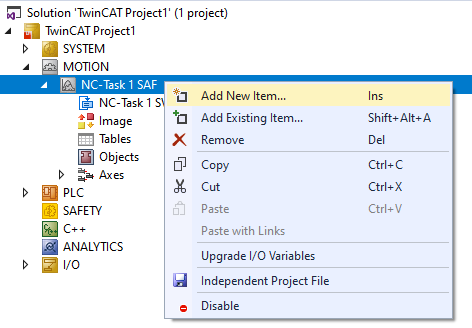
- Durch das Hinzufügen eines Kanals wird eine Instanz einer Kinematikgruppe erzeugt.
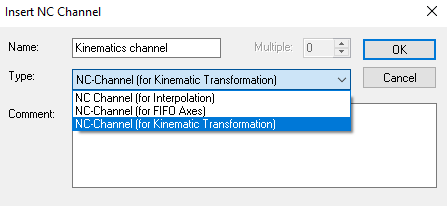
- 5. Den Kanaltyp auswählen: NC-Kanal (für Kinematic Transformation) um eine kinematische Transformation auszuführen.
- 6. Die Objekte unter der Gruppe hinzufügen, die die kinematische Konfiguration des Benutzers darstellen.
- 7. Zum Starten der Transformation für einen Delta-Roboter, wählen Sie z.B.
- Delta Type 1
Zusätzlich können optional Werkzeuge und Koordinatensysteme (UCS) angelegt werden.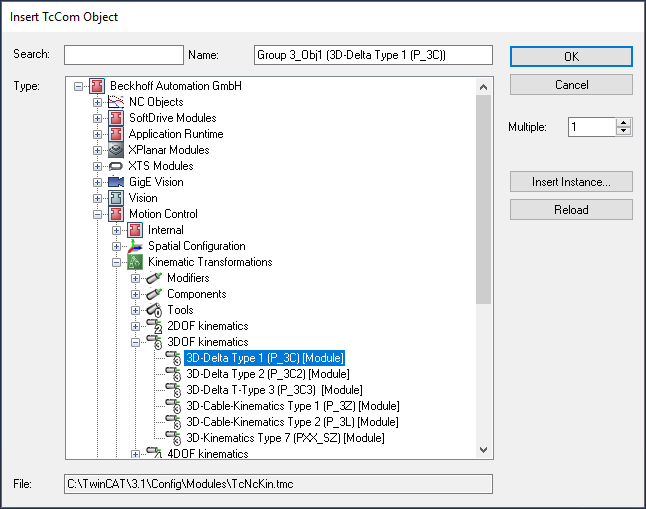
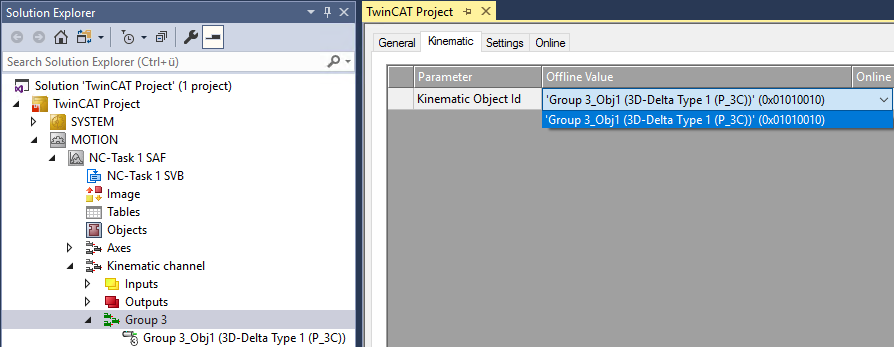
- 8. Die Transformationsgruppe muss wissen, welches Root-Modul aufzurufen ist. Deshalb muss die Objekt-ID der Kinematik (in diesem Fall Delta Type1) ausgewählt werden. Das Kinematik-Objekt definiert die Anzahl der in der SPS zu verwendenden ACS - und MCS -Achsen (siehe ST_KinAxes).
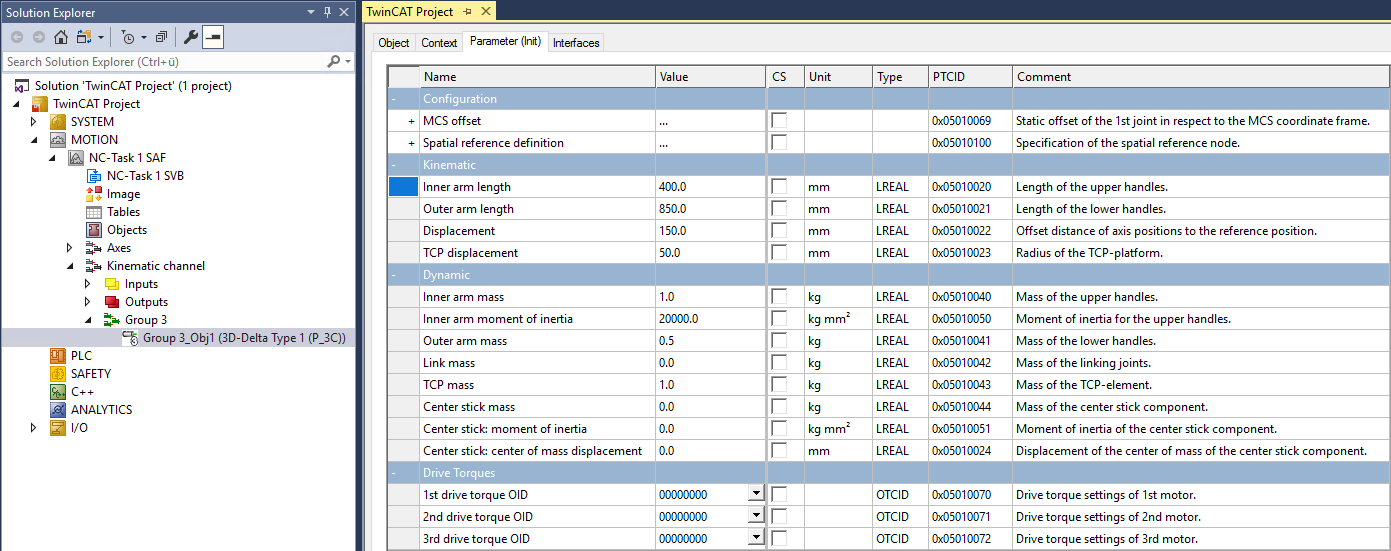
- 9. Die Objektparameter entsprechend der verwendeten Kinematik parametrieren.
- 10. Die Transformation kann jetzt von der SPS aus aktiviert werden (siehe SPS-Bibliothek). Zum Ansprechen der Transformation ein zyklisches Kanalinterface in der SPS definieren und dieses mit den I/O des Kinematikkanals verknüpfen.
in_stKinToPlc AT %I* : NCTOPLC_NCICHANNEL_REF;
out_stPlcToKin AT %Q* : PLCTONC_NCICHANNEL_REF;