Einführung
Das TF5110 - TF5113 TwinCAT Kinematic Transformation Software Paket wird zusammen mit dem TF5400 Software Paket installiert.
TwinCAT Kinematic Transformation
Die TF5110 - TF5113 TwinCAT Kinematic Transformation ist eine Software Lösung, die Robotersteuerung und konventionelle SPS in einem System vereint (siehe https://www.beckhoff.de/tf5113/). Durch die Implementierung der gesamten Steuerung in einem System entfallen Schnittstellenverluste zwischen verschiedenen CPUs für SPS, Motion Control und Robotik. In der Praxis führt diese Implementierung zu einer Reduktion von Engineeringkosten und zu einer Verkürzung von Takzzeiten im Fertigungsprozess. Zusätzlich zum Wegfall von Schnittstellen und Komponenten führt das Verschmelzen von SPS, Robotik und Motion Control zu einer Applikation zu einem homogenen System. Deshalb gibt es für den Anwender keinen erkennbaren Unterschied in der Behandlung der einzelnen Funktionalitäten. Auf diese Weise ist es problemlos möglich, ein Teil auf einem Förderband, das mit Standard-Motion-Control betrieben wird, mit dem Roboter zügig und geschickt zu greifen und wegzulegen.
Da der Aufbau und die Anzahl der Achsen den Arbeitsraum des Roboters bestimmen, ist dieser von verschiedenen Parametern abhängig: Armlängen, Reichweitenwinkel, Schwerpunkt, max. Last etc. Die Anordnung der Arme und Gelenke bestimmt die kinematische Struktur, die in zwei Hauptklassen geteilt wird – die serielle Kinematik und die parallele Kinematik.
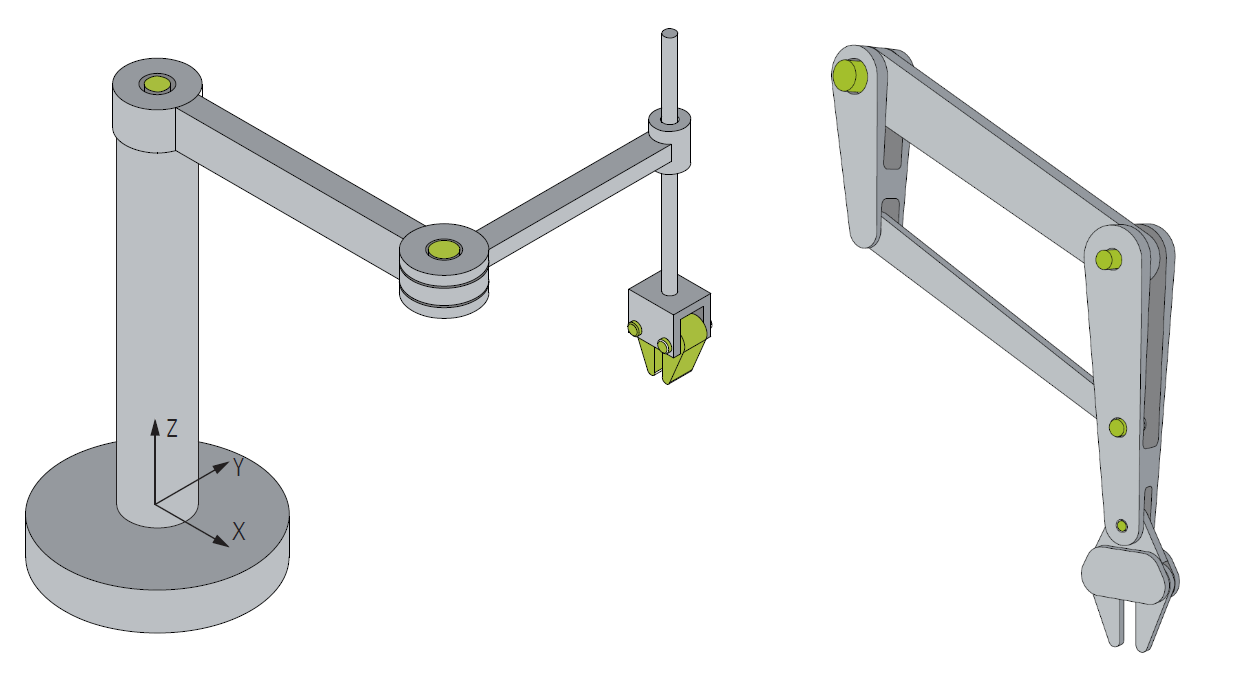
Serielle Kinematik
Die aktuelle Position einer beliebigen Achse ist immer von der Position der vorhergehenden Achse abhängig, das heißt alle Achsen sind nacheinander angeordnet.
Beispiele: SCARA und Kran-Kinematik
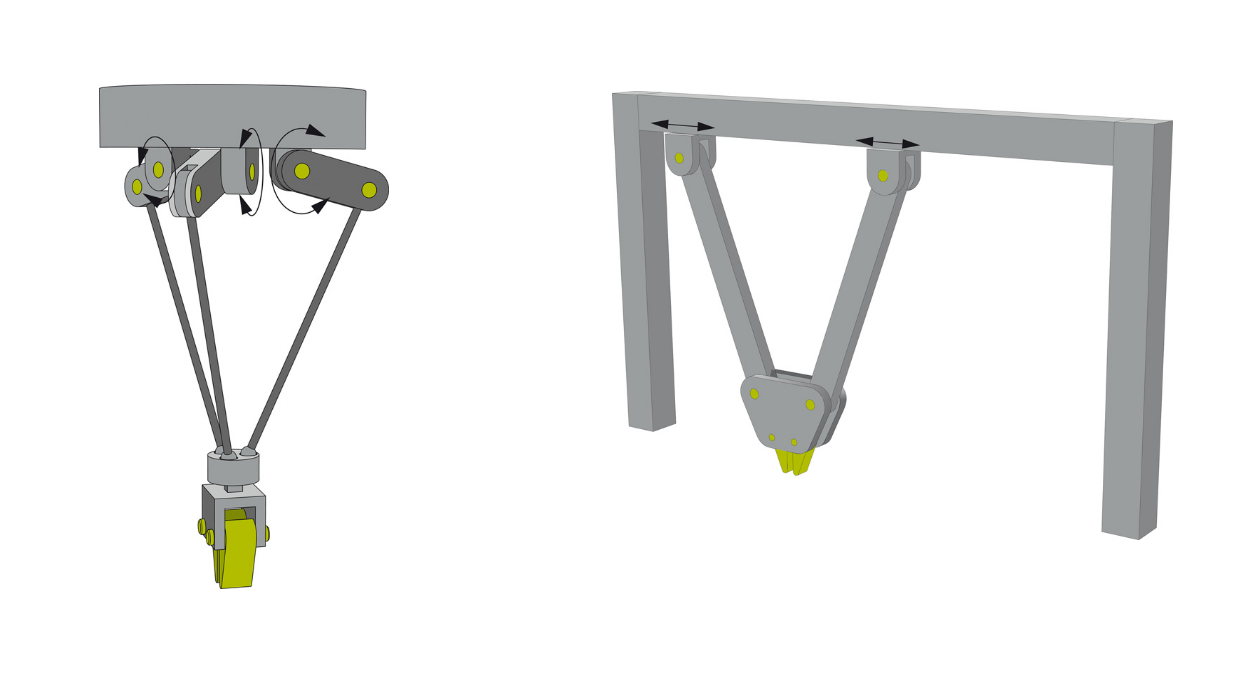
Parallele Kinematik
Alle Achsen greifen über die Kinematik direkt an der Arbeitsplattform an.
Beispiele: Delta-Kinematik, Scheren-Kinematik
Koordinatensysteme
Zur Beschreibung des Positionierverhaltens eines Systems benötigt man Koordinatensysteme. Zur Programmierung können unterschiedliche Koordinatensysteme als Grundlage genutzt werden:
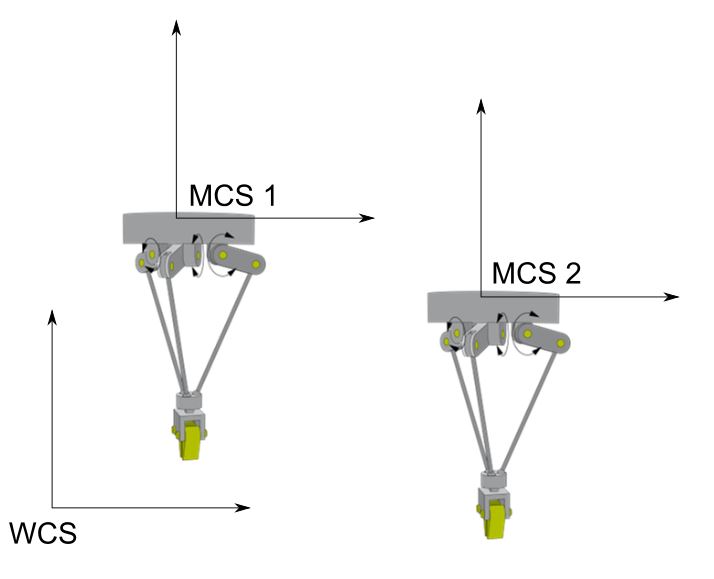
- Das Maschinenkoordinatensystem (MCS ) ist ein robotergebundenes kartesisches Koordinatensystem, welches seinen Ursprung üblicherweise im Sockel des Roboters hat.
- Das Weltkoordinatensystem (WCS ) ist ein kartesisches Koordinatensystem, welches die gesamte modellierte Welt beschreibt. Es bezieht sich also nicht auf einen speziellen Roboter, sondern auf die gesamte Anlage. Der Ursprung eines roboterbezogenen Maschinenkoordinatensystems (MCS) liegt in einem Punkt des WCS. Der Anwender kann also festlegen, an welchem Ort seiner „Welt“ sich ein Industrieroboter befindet und wie dieser ausgerichtet ist. Somit ist es auch möglich, dass sich mehrere Roboter in einem WCS befinden. Bei der Verwendung eines Roboters können Weltkoordinaten für eine bessere Übersichtlichkeit aber auch mit den Maschinenkoordinaten zusammenfallen.
- Das Anwenderkoordinatensystem (UCS) kann vom Anwender frei an einer beliebigen Position und mit beliebiger Ausrichtung im Weltkoordinatensystem platziert werden.
- Das Achskoordinatensystem (ACS) beschreibt die Stellung der physikalischen Achsen und ist im Allgemeinen kein kartesisches Koordinatensystem. Viele Robotergelenkachsen vollführen rotatorische Bewegungen. Die Verwendung des ACS erleichtert die Berücksichtigung der Grenzwerte für Winkel, Geschwindigkeit und Beschleunigung. Vollführen Roboterachsen jedoch rotatorische Bewegungen, so ist der Bahnverlauf für den Anwender häufig schwer abschätzbar und kontrollierbar. In der Regel wird das Achskoordinatensystem für Referenzierung bzw. Homing eingesetzt.
Kinematische Transformation
Die Programmierung der Roboter erfolgt häufig im MCS. Da Bewegungen aufgrund des menschlichen Vorstellungsvermögens meist in kartesischen Koordinatensystemen programmiert werden, ist zur Ausführung einer solchen Bewegung eine Umrechnung zwischen Achskoordinatensystem und kartesischem Raum notwendig.
Die Transformation beschreibt, im Zusammenhang mit der Kinematik, die notwendige Berechnung, um von einem Koordinatensystem in ein anderes zu wechseln. Bei der Betrachtung der Kinematiken von Robotern stellen sich grundsätzlich zwei Probleme:
- Die Umrechnung vom Achskoordinatensystem (ACS) in ein kartesisches Koordinatensystem wird als Vorwärtstransformation bezeichnet. Dabei wird die kartesische Position des Tool-Center-Points (TCP) aus den achsspezifischen Gelenkkoordinaten des Roboters berechnet.
- Die Umrechnung von kartesischen Koordinaten des TCP in Achskoordinaten, die notwendig ist, um die realen Roboterachsen zu bewegen, wird als Rückwärtstransformation bezeichnet.
Realisierung in TwinCAT
Mit TwinCAT Kinematic Transformation lassen sich Robotikapplikationen realisieren. Alle SPS- und NC-Eigenschaften können auf einer gemeinsamen Hard- und Softwareplattform kombiniert werden. TwinCAT Kinematische Transformation realisiert diverse Roboterkinematiken (z. B. H-Bot, Delta-Roboter, 6-Achs-Roboter) auf dem PC, die Ansteuerung der Achsen erfolgt direkt aus dem TwinCAT-Motion-Control-System heraus.
Roboterbewegungen werden dabei vom Anwender direkt im kartesischen Koordinatensystem, die Software rechnet in jedem Zyklus die Transformation in das Achskoordinatensystem des Roboters. Zur Minimierung der Schwingungsneigung und zur Erhöhung der Positioniergenauigkeit ist für viele Kinematiken noch eine Stromvorsteuerung aktivierbar, wenn die Antriebsverstärker und der Feldbus schnell genug sind und Schnittstellen für eine zusätzliche Stromvorsteuerung zur Verfügung stehen. EtherCAT und die Beckhoff Servoachsen erfüllen diese Anforderungen.
Die TwinCAT Function fügt sich dabei nahtlos in die Motion-Control-Welt von Beckhoff ein. Speziell für die einfache Realisierung von Handlingaufgaben gibt es TF5420 TwinCAT 3 Motion Pick-and-Place. Durch TF5100 TwinCAT 3 NC I ist die Programmierung sowohl über G-Code (DIN 66025) als auch direkt aus der SPS (PlcInterpolation-Bibliothek) möglich. Die Functions TF5055 TwinCAT 3 NC Flying Saw und TF5050 TwinCAT 3 NC Camming ermöglichen z. B. die Synchronisation mit Förderbändern für das Greifen und Absetzen von Werkstücken. Darüber hinaus können standardmäßige PTP-Funktionen aus den bekannten Beckhoff PTP-Motion-Bibliotheken verwendet werden.
Die Konfiguration des Roboters erfolgt komplett in der TwinCAT 3 Engineering Umgebung (XAE).