FB_KinCalcTrafo

Mit dem Funktionsbaustein FB_KinCalcTrafo wird die Vorwärts- oder Rückwärtstransformation berechnet, selbst dann, wenn keine Kinematikgruppe mit FB_KinConfigGroup erstellt wurde.
 Eingänge
Eingänge
VAR_INPUT
bExecute : BOOL;
bForward : BOOL;
oidTrafo : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
bExecute | BOOL | Der Befehl wird durch eine steigende Flanke an diesem Eingang ausgelöst. |
bForward | BOOL | Bestimmt, ob die Vorwärts- oder Rückwärtstransformation berechnet wird. |
oidTrafo | UDINT | Objekt-ID des kinematischen Transformationsobjekts. Siehe Beispiel unten. |
 Ein-/Ausgänge
Ein-/Ausgänge
VAR_IN_OUT
stAxesPosIn : ARRAY[1..8] OF LREAL;
stAxesPosOut : ARRAY[1..8] OF LREAL;
uMetaInfoIn : U_KinMetaInfo;
uMetaInfoOut : U_KinMetaInfo;
END_VARName | Typ | Beschreibung |
|---|---|---|
stAxesPosIn | ARRAY[1..8] OF LREAL | Array, das die Eingangspositionen der Transformation enthält. Bei der Berechnung einer Vorwärtstransformation stellen diese die Gelenkpositionen dar. Bei der Berechnung einer Rückwärtstransformation stellen diese die kartesischen Achspositionen dar. |
stAxesPosOut | ARRAY[1..8] OF LREAL | Array, das die Ergebnispositionen der Transformation enthält. Im Falle der Berechnung einer Vorwärtstransformation stellen diese die kartesischen Achspositionen dar. Im Falle der Berechnung einer Rückwärtstransformation stellen diese die Gelenkpositionen dar. |
uMetaInfoIn | Wenn verschiedene Roboterkonfigurationen zu einer Lösung führen, kann die Lösung ausgewählt werden, die verwendet werden soll (siehe Beispiel). Für Kinematiken, bei denen dieser Parameter nicht benötigt wird, kann dieser Eingang mit einer Dummy-Variablen belegt werden. | |
uMetaInfoOut | Wenn verschiedene Lösungen für eine Transformation möglich sind, wird die gefundene Lösung spezifiziert. Für Kinematiken, bei denen dieser Parameter nicht benötigt wird, kann dieser Eingang mit einer Dummy-Variablen belegt werden. |
 Ausgänge
Ausgänge
VAR_OUTPUT
bBusy : BOOL;
bDone : BOOL;
bError : BOOL;
nErrorId : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
bBusy | BOOL | Der Ausgang wird TRUE, wenn der Befehl mit bExecute gestartet ist und bleibt es dann so lange, wie der Funktionsbaustein den Befehl ausführt. Während bBusy gleich TRUE ist, wird an den Eingängen kein neuer Befehl angenommen. Wenn bBusy wieder FALSE wird, ist der Funktionsbaustein bereit für einen neuen Befehl. Gleichzeitig wird einer der Ausgänge bDone oder bError gesetzt. |
bDone | BOOL | Der Ausgang wird TRUE, wenn der Befehl erfolgreich ausgeführt wurde. |
bError | BOOL | Der Ausgang bError wird auf TRUE gesetzt, wenn bei der Ausführung des Befehls ein Fehler aufgetreten ist. |
nErrorId | UDINT | Enthält den befehlsspezifischen Fehlercode des zuletzt ausgeführten Befehls. Der Fehlercode kann in der ADS-Fehlerdokumentation oder in der NC-Fehlerdokumentation (Fehlercodes ab 0x4000) nachgeschlagen werden. |
Beispiel
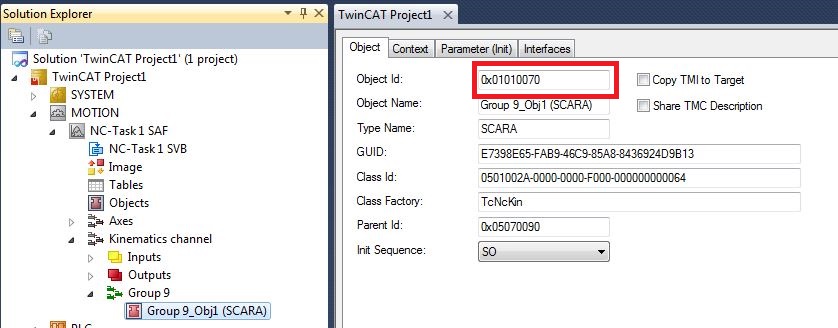
Die Objekt-Id der Transformation kann aus dem Transformationsobjekt unter dem Kinematikkanal eingesehen werden.
SCARA-Transformation - Beispiel-Objekt-ID
VAR
fbKinCalcTrafo : FB_KinCalcTrafo;
stAxesPosIn : ARRAY[1..8] OF LREAL;
stAxesPosOut : ARRAY[1..8] OF LREAL;
bUserExecute : BOOL;
bUserCalcFwdTrafo : BOOL;
uScaraMetaInfoIn : U_KinMetaInfo;
uScaraMetaInfoOut : U_KinMetaInfo;
END_VARuScaraMetaInfoIn.eScara := E_KinMetaInfoScara.scaraLeftArm;
fbKinCalcTrafo(
bExecute := bUserExecute,
bForward := bUserCalcFwdTrafo,
oidTrafo := 16#01010070,
stAxesPosIn := stAxesPosIn,
stAxesPosOut := stAxesPosOut,
uMetaInfoIn:= uScaraMetaInfoIn ,
uMetaInfoOut:= uScaraMetaInfoOut,
bBusy=> ,
bDone=> ,
bError=> ,
nErrorId=> );