FB_KinConfigGroup

Mit dem Funktionsbaustein FB_KinConfigGroup werden Achsen entsprechend der kinematischen Transformation konfiguriert. Diese sind Achsen für das ACS (Gelenk) und das MCS (kartesisch). Der Funktionsbaustein nimmt die in der stAxesList definierten ACS- und MCS-Achsen und konfiguriert sie in der Kinematikgruppe von stKinRefIn.
 Eingänge
Eingänge
VAR_INPUT
bExecute : BOOL;
bCartesianMode : BOOL;
END_VARName | Typ | Beschreibung |
|---|---|---|
bExecute | BOOL | Der Befehl wird durch eine steigende Flanke an diesem Eingang ausgelöst. |
bCartesianMode | BOOL | Wenn FALSE, dann können die ACS-Achsen (Gelenk) direkt bewegt werden. Wenn TRUE, dann wird die in den MCS-Achsen (kartesisch) beschriebene Bewegung in eine Bewegung der ACS-Achsen (Gelenk) transformiert. Die ACS-Achsen können nicht direkt bewegt werden. |
 Ein-/Ausgänge
Ein-/Ausgänge
VAR_IN_OUT
stAxesList : ST_KinAxes;
stKinRefIn : NCTOPLC_NCICHANNEL_REF;
END_VARName | Typ | Beschreibung |
|---|---|---|
stAxesList | ST_KinAxes | Bestimmt die ACS- und MCS-Achsen, die in der Konfiguration enthalten sind. Siehe ST_KinAxes. |
stKinRefIn | NCTOPLC_NCICHANNEL_REF | Bestimmt die Kinematikgruppe der Konfiguration. |
 Ausgänge
Ausgänge
VAR_OUTPUT
bBusy : BOOL;
bDone : BOOL;
bError : BOOL;
nErrorId : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
bBusy | BOOL | Der Ausgang wird TRUE, wenn der Befehl mit bExecute gestartet ist und bleibt es dann so lange, wie der Funktionsbaustein den Befehl ausführt. Während bBusy gleich TRUE ist, wird an den Eingängen kein neuer Befehl angenommen. Wenn bBusy wieder FALSE wird, ist der Funktionsbaustein bereit für einen neuen Befehl. Gleichzeitig wird einer der Ausgänge bDone oder bError gesetzt. |
bDone | BOOL | Der Ausgang wird TRUE, wenn der Befehl erfolgreich ausgeführt wurde. |
bError | BOOL | Der Ausgang bError wird auf TRUE gesetzt, wenn bei der Ausführung des Befehls ein Fehler aufgetreten ist. |
nErrorId | UDINT | Enthält den befehlsspezifischen Fehlercode des zuletzt ausgeführten Befehls. Der Fehlercode kann in der ADS-Fehlerdokumentation oder in der NC-Fehlerdokumentation (Fehlercodes ab 0x4000) nachgeschlagen werden. |
Beispiel
VAR
io_X : AXIS_REF;
io_Y : AXIS_REF;
io_Z : AXIS_REF;
io_M1 : AXIS_REF;
io_M2 : AXIS_REF;
io_M3 : AXIS_REF;
in_stKinToPlc AT %I* : NCTOPLC_NCICHANNEL_REF;
fbConfigKinGroup : FB_KinConfigGroup;
stAxesConfig : ST_KinAxes;
bAllAxesReady : BOOL;
bExecuteConfigKinGroup: BOOL;
bUserConfigKinGroup : BOOL;
bUserCartesianMode : BOOL := TRUE;
(*true: cartesian mode - false: direct mode (without transformation) *)
END_VAR(* read the IDs from the cyclic axis interface so the axes can mapped later to the kinematic group *)
stAxesConfig.nAxisIdsAcs[1] := io_M1.NcToPlc.AxisId;
stAxesConfig.nAxisIdsAcs[2] := io_M2.NcToPlc.AxisId;
stAxesConfig.nAxisIdsAcs[3] := io_M3.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[1] := io_X.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[2] := io_Y.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[3] := io_Z.NcToPlc.AxisId;
IF bAllAxesReady AND bUserConfigKinGroup THEN
bExecuteConfigKinGroup := TRUE;
ELSE
bExecuteConfigKinGroup := FALSE;
END_IF
fbConfigKinGroup(
bExecute := bExecuteConfigKinGroup ,
bCartesianMode := bUserCartesianMode ,
stAxesList := stAxesConfig,
stKinRefIn := in_stKinToPlc ); Zustand der Kinematikgruppe
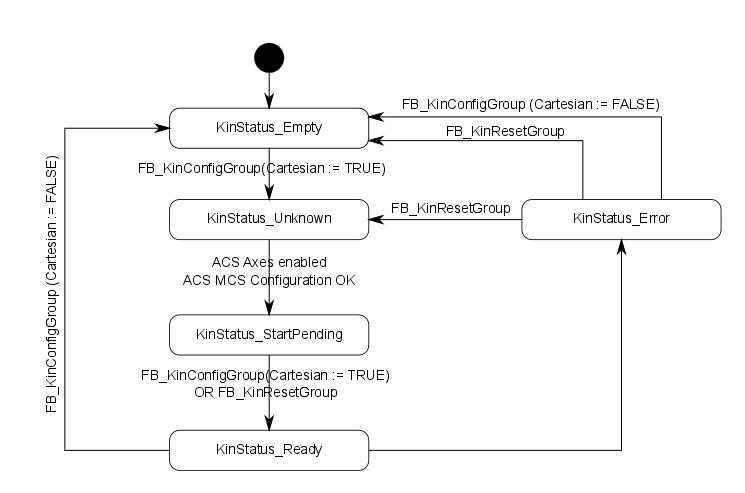
 | Konfiguration freigeben Die ACS-Achsen müssen durch MC_Power freigegeben sein, damit der Zustand den Wert KinStatus_Ready erreichen kann. Wenn die ACS-Achsen nicht freigegeben sind, geben Sie die Achsen frei und rufen dann FB_KinConfigGroup oder FB_KinResetGroup auf. |