Selbstjustierung
Die Schrittmotorklemme bietet die Möglichkeit einer einfachen "on the fly" Selbstjustierung. Eine Linearachse bietet hierfür eine sinnvolle Plattform.
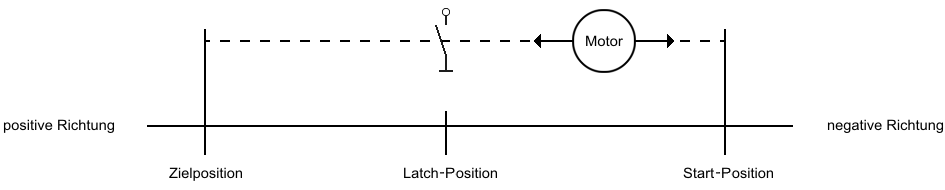
Ein auf der Wegstrecke positionierter Schalter dient als auslösender Sensor. Wird er überfahren, löst er in der Klemme ein Latch-Ereignis aus (es kann ein beliebiger Latch-Eingang verwendet werden).
Beim ersten Mal wird der Latch-Wert als Referenzposition genommen. Wird der Punkt erneut überfahren, und ein Latch-Wert gespeichert, korrigiert die Klemme beim nächsten Stillstand die Differenz zwischen der Referenzposition und dem im laufenden Betrieb gelatchten Wert. Die genaue Vorgehensweise ist weiter unten im Beispiel detailliert beschrieben.
Beispiel
In dem folgenden Beispiel wird eine Selbstjustierung durchgeführt.
- Setzen Sie im Control-Byte das Bit CB.0 auf 1, um die Motoransteuerung freizuschalten.
- Tragen Sie über Registerkommunikation das Kommando 0x0530 in Register R7 ein, um die Selbstjustierung zu aktivieren.
- Aktivieren Sie unter Verwendung von Bit CW.0 bis CW.4 im Control-Wort ein Latchereignis, um die Referenz-Position zu latchen.
- Tragen Sie einen Geschwindigkeitswert in das Prozessdatenwort DataOUT ein, um den Motor zur Referenzposition zu fahren.
- Die Klemme setzt das Bit SW.4 nachdem die Referenzposition überfahren wurde.
- Setzen Sie die Geschwindigkeit im Prozessdatenwort DataOUT auf null und löschen Sie die Latchfreigabe (die Referenzposition wird jetzt erst gespeichert).
- Tragen Sie einen entgegengesetzten Geschwindigkeitswert in das Prozessdatenwort DataOUT ein, um den Motor wieder auf die Ausgangsposition zu fahren.
- An der Ausgangsposition angekommen, aktivieren Sie im Control-Wort wieder das Latchereignis, mit dem zuvor referenziert wurde.
- Tragen Sie jetzt über Prozessdatenkommunikation einen Geschwindigkeitswert in DataOUT ein, um den Motor wieder über den Latchpunkt zu fahren.
- Setzen Sie jetzt über Prozessdatenkommunikation die Geschwindigkeit auf null und löschen Sie die Latchfreigabe (die aktuelle Position wird jetzt korrigiert).
- Tragen Sie über Registerkommunikation das Stop-Kommando 0x0540 in Register R7 ein, um die Selbstjustierung zu deaktivieren.