Einstellungen mit dem Drive Manager
(Master TwinCAT 2.11 R3)
Die hier angegebenen Daten sind beispielhaft für einen Servomotor AM8131-0F20-0000 der Firma Beckhoff Automation aufgeführt. Bei anderen Motoren und je nach Applikation können die Werte variieren.
 | Einsatz des Drive Managers ab Revisionsstand -0019 Der Drive Manager wird erst ab der Revision -0019 der EL72x1-xxxx unterstützt. Sollten Sie eine ältere Version verwenden, müssen Sie die Einstellungen manuell durchführen. Sehen Sie dazu die Kapitel "Einstellungen im CoE" und "Einstellungen in der NC" |
Inhaltsverzeichnis |
|---|
Sie finden den TwinCAT Drive Manager zum Download auf der Beckhoff Webseite.
Der TwinCAT Drive Manager für die Parametrierung einer EL72x1-xxxx Servoklemme ist in den System Manager integriert, so dass kein separates Konfigurationstool erforderlich ist. Nachdem eine Servoklemme erkannt oder eingetragen wurde, steht der TwinCAT Drive Manager im Karteireiter „Configuration“ (Konfiguration) zur Verfügung.
Die nachfolgenden Punkte sollen als Start-up dienen, um die Servoklemme in relativ kurzer Zeit in Betrieb nehmen zu können. Detaillierte Informationen zum Drive Manager entnehmen Sie bitte der zugehörigen Dokumentation "AX5000 Einführung in den TCDrivemanager"
Start-up mit dem Drive Manager
- Die Klemme muss bereits unter E/A-Geräte manuell eingefügt oder vom System eingescannt worden sein (siehe Kapitel "Konfigurationserstellung in TwinCAT")
- Die Klemme muss bereits in der NC eingebunden sein (siehe Kapitel "Einbindung in die NC-Konfiguration")
- Wählen Sie den Karteireiter Configuration der EL72x1-xxxx.
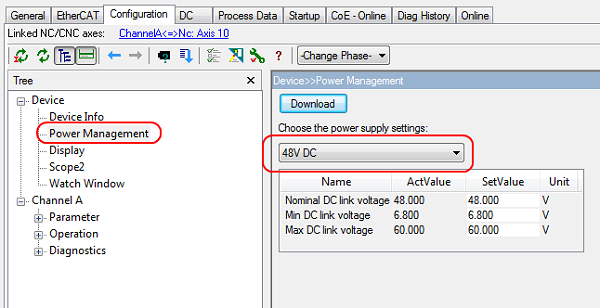
- Unter Power Management können Sie die angeschlossene Spannung auswählen.
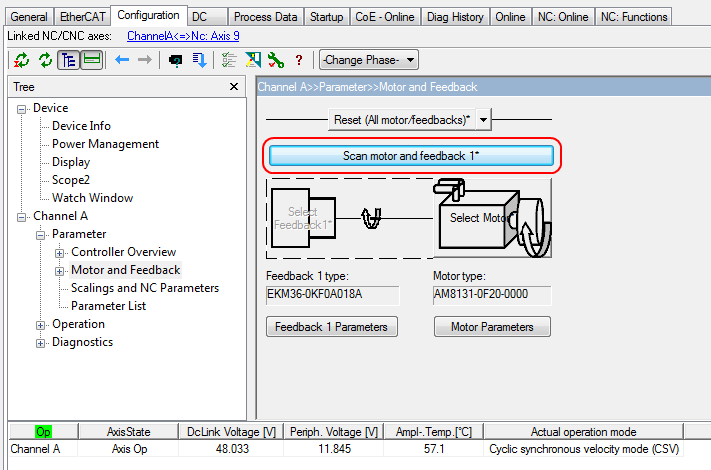
- Sie können anschließend unter Motor and Feedback den angeschlossenen Motor scannen oder auswählen. Sollten Sie sich für das automatische Scannen entscheiden, klicken Sie auf Scan motor and feedback. Anschließend wird automatisch das elektronische Typenschild der AM81xx-x2xx Motoren ausgelesen. Dazu ist es erforderlich, dass das automatische Scannen des Motors in der Klemme aktiviert ist (Index 0x8008, MDP oder Index 0x2018, DS402)
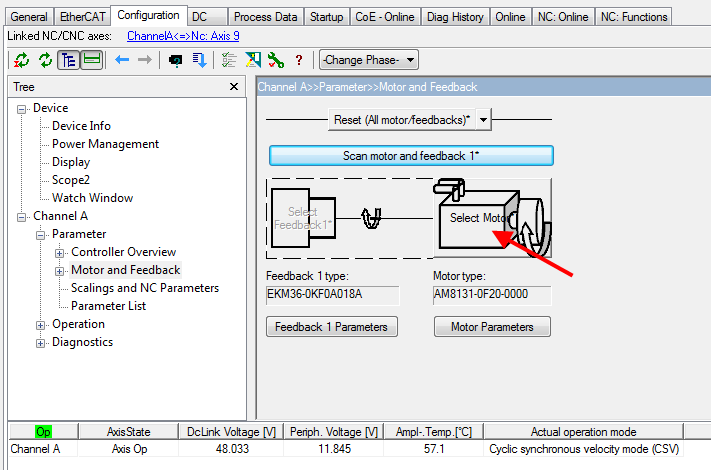
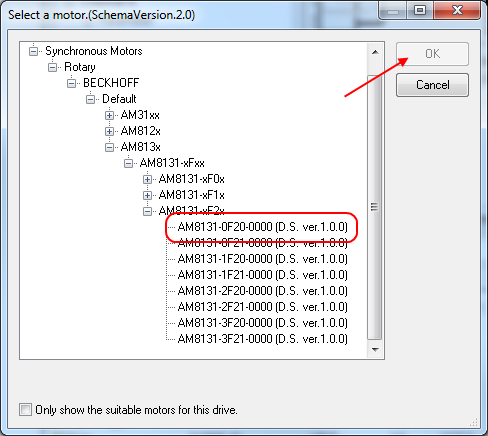
- Sollten Sie sich für die manuelle Eingabe des angeschlossenen Motors entscheiden, klicken Sie bitte auf Select Motor.
- Im Auswahlfenster können Sie den passenden Motor auswählen und mit Ok bestätigen.
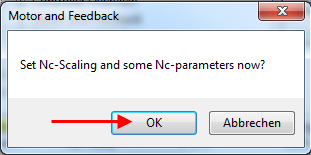
- Das nächste Dialogfenster sollte mit Ok bestätigt werden. Damit werden automatisch nötige Parameter in der NC eingetragen und der Skalierungsfaktor berechnet. Wird dies nicht bestätigt, müssen Sie diese Einstellungen manuell eintragen. Sehen Sie dazu Kapitel "Einstellungen in der NC".
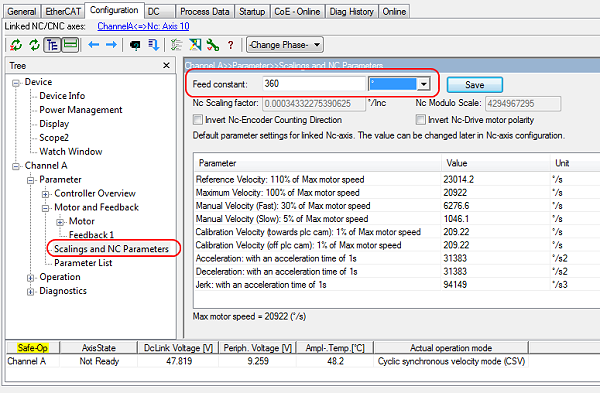
- Unter Scalings and NC Parameters können Sie die Skalierung bestimmen. Hier ist beispielhaft definiert, dass eine Motorumdrehung 360° entspricht. Alle nötigen Parameter werden automatisch angepasst. Die Einstellung wird erst übernommen, wenn Sie die Konfiguration aktivieren.
Damit sind alle wichtigen Parameter für die Inbetriebnahme des Motors eingestellt. Sie können den Motor nun beispielsweise mit der NC in Betrieb nehmen. Eine kurze Beschreibung hierzu finden Sie im Kapitel "Inbetriebnahme des Motors mit der NC". Oder Sie sprechen die NC aus der PLC heraus an. Auch dazu ist in der Dokumentation ein kleines Beispielprogramm hinzugefügt worden.
Sie haben weiterhin die Möglichkeit einige Parameter manuell in Ihrer Applikation anzupassen.
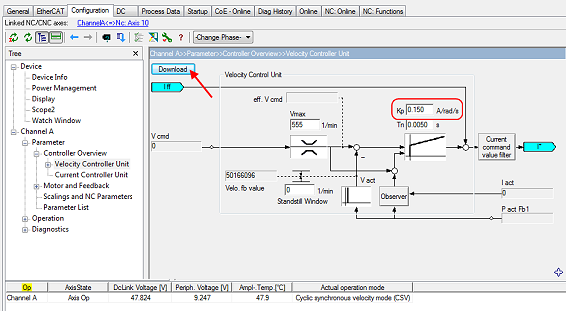
Anpassung weiterer Parameter mit dem Drive Manager
Die hier angegebenen Werte sind beispielhaft und haben in den meisten Fällen zu sehr guten Ergebnissen geführt. Je nach Applikation können andere Werte zu besseren Ergebnissen führen.
Sie können diese Werte im laufenden Betrieb ändern. Sobald Sie auf Download klicken, werden die Werte übernommen.
Integralanteil Geschwindigkeitsregler Tn
- Verringern Sie den Wert, bis der Motor anfängt leicht zu schwingen. Erhöhen Sie diesen Wert anschließend um 10 %.
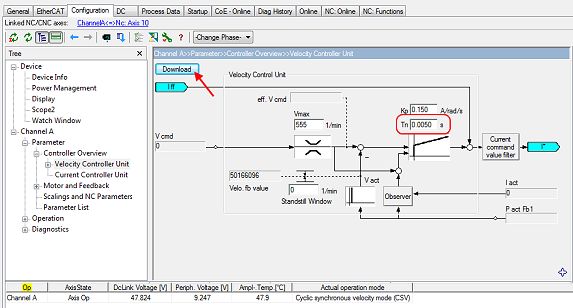
Proportionalanteil Geschwindigkeitsregler Kp
- Erhöhen Sie den Wert, bis der Motor anfängt leicht zu schwingen. Verringern Sie diesen Wert anschließend auf 80 %.