Prozessdaten
Die Prozessdatenübersicht listet die detaillierte PDO-Auswahl auf. Für den Betrieb unter TwinCAT sind diese Angaben üblicherweise nicht nötig, da sie von der Konfigurationsoberfläche über die Prozessdatenvorauswahl einfach konfiguriert werden kann.
Prozessdatenvorauswahl
Ein EtherCAT Gerät bietet üblicherweise mehrere verschiedene Prozessdatenobjekte (PDO) für Input- und Outputdaten an, die im Systemmanager konfiguriert d.h. zur zyklischen Übertragung aktiviert oder deaktiviert werden können. Die entsprechende Übersicht siehe weiter unten. Dabei ist auf Kompatibilität von In- und Output-PDO zu achten.
Ab TwinCAT 2.11 können bei den lt. ESI/XML-Beschreibung dafür vorgesehenen EtherCAT-Geräten die Prozessdaten für Input und Output gleichzeitig durch entsprechende vordefinierte Sätze aktiviert werden, "predefined PDO".
Die EL2212 verfügt im Tab "Process Data"
 Abb.149: Karteireiter "Process Data"
Abb.149: Karteireiter "Process Data"über folgende "predefined PDO" Sätze:
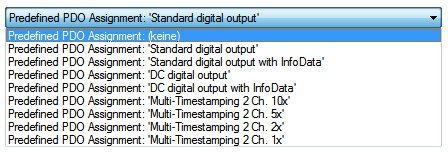 Abb.150: TwinCAT Systemmanager mit der PDO-Auswahl
Abb.150: TwinCAT Systemmanager mit der PDO-AuswahlIm Einzelnen setzen sich die Sätze wie folgt zusammen:
|
Betriebsart |
Name |
SM2, PDO-Zuordnung |
SM3, PDO-Zuordnung |
|---|---|---|---|
|
SM-syncron "frame-getriggert" |
Standard digital output (default Einstellung) |
0x1600 |
0x1A00 |
|
Standard digital output with InfoData |
0x1600 |
0x1A00 | |
|
DistributedClocks-getriggert |
DC Digital output |
0x1600 |
0x1A00 |
|
DC Digital output with InfoData |
0x1600 |
0x1A00 | |
|
Multi-Timestamping 2 Ch. 10x |
0x1603 |
0x1A05 | |
|
Multi-Timestamping 2 Ch. 5x |
0x1603 |
0x1A05 | |
|
Multi-Timestamping 2 Ch. 2x |
0x1603 |
0x1A05 | |
|
Multi-Timestamping 2 Ch. 1x |
0x1603 |
0x1A05 |
Erläuterung der Prozessdaten
Standard digital output (default)
Mit dieser Standard-PDO-Zuordnung können die Ausgänge direkt beschrieben, d.h. die angeschlossenen Aktoren direkt frame-getriggert geschaltet werden.
 Abb.151: Standard Prozessabbild EL2212
Abb.151: Standard Prozessabbild EL2212 Die EL2212 (A) verfügt über 2-Byte-Variablen mit unterschiedlichen Bitbedeutungen. Diese sind im Baum aufklappbar sichtbar (A). Sie werden auch in der Detailansicht (B) dargestellt, wenn die entsprechende Anzeigefunktion (C) aktiviert ist.
Die Bitbedeutung d.h. Offsetposition kann dann auch unter Berücksichtigung der Variablengröße (D) der Speicherbelegungsanzeige (E) entnommen werden.
Es kann sowohl der Sammelname z.B. Status wie auch die einzelne Bitvariable wie z.B. OutputActive verlinkt werden, aber nicht beide zugleich.
Eingangsdaten | |||
|---|---|---|---|
Sammelname | Name | Beschreibung / Funktion | Bitposition [0..15] |
Status | Ready to activate | Die Klemme signalisiert hier ihre Betriebsbereitschaft. | 0 |
| Output active | Der Ausgang ist aktiv geschaltet. | 1 |
| Tristate active | Die Ausgangstreiber sind hochohmig geschaltet, die Last ist werde mit GND noch Versorgungsspannung verbunden | 2 |
| PWM active | Die PWM ist auf dem Ausgang n aktiv geschaltet. | 3 |
| Warning | Es ist ein Warnung aufgetreten -> "Diag data" (Index 0xA000) auswerten. | 6 |
| Error | Es ist ein Fehler aufgetreten und Ausgangstreiber sind deaktiviert -> "Diag data" (Index 0xA000) auswerten. | 7 |
| TxPDO Toggle | Wechselt bei jedem Prozessdatenaustausch seinen Zustand. | 15 |
WcState |
| Sollwert im Betrieb: 0 Jedes Datagramm der EL2212 zeigt hier seinen Bearbeitungszustand an. Dadurch kann die EL2212 auf korrekte Prozessdatenkommunikation überwacht werden. |
|
InfoData (State) |
| Sollwert im Betrieb: 8 Zustandsanzeige der "EtherCAT State Machine" |
|
AdsAddr |
| AMS-Adresse des zuständigen EtherCAT-Masters im Format "0.0.0.0.0.0". Außerdem die für diesen Slave gültige Portnummer. Wird für azyklische Zugriffe zur Laufzeit auf das CoE benötigt. |
|
Hinweis: Die EL2212 liefert 2 unterschiedliche Status-Words (16 Bit):
- Wie hier angegeben im zyklischen PDO
- Im CoE 0x90n0:01 gibt es ein weiteres 16 bit Statusword mit mehr Informationen. Dieses kann per ADS ausgelesen oder in die zyklischen PDO InfoData gemappt werden.
Ausgangsdaten | |||
|---|---|---|---|
Sammelname | Name | Beschreibung / Funktion | Bitposition [0..15] |
Control
| Output | Ausgang von Kanal n aktiv schalten | 1 |
Tristate | Kanal n hochohmig schalten | 2 | |
PWM | PWM durchschalten | 3 | |
Reset | Rücksetzen eines Fehlers von Kanal n | 7 | |
 | Prioritäten beachten Sind die beiden Signale "Output" und "Tristate" gleichzeitig aktiviert, hat "Tristate" eine höhere Priorität. |
Standard digital output with InfoData
 Abb.152: Zusätzliche Informationsdaten
Abb.152: Zusätzliche InformationsdatenFür genauere Informationen über den Zustand der Aktoren bzw. der Treiberstufe können pro Kanal zwei weitere zyklische Datenworte eingeblendet werden. Die jeweilige Auswhal ist über den entsprechenden Index 0x80n2:11 im CoE zu konfigurieren. Wählbar sind unter anderen z.B. die Innentemperatur der Klemme oder der aktuelle Strom durch den angeschlossenen Aktor.
|
Eingangsdaten | |
|---|---|
|
Name |
Beschreibung / Funktion |
|
Info data 1 |
Zusätzliche Kanal-Informationen, Festlegung in 0x80n2:11 |
|
Info data 2 |
Zusätzliche Kanal-Informationen, Festlegung in 0x80n2:19 |
DC Digital output
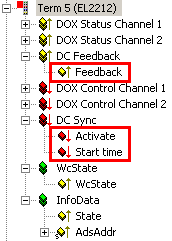 Abb.153: Zusätzliche Prozessdaten bei Distributed-Clocks-Betrieb
Abb.153: Zusätzliche Prozessdaten bei Distributed-Clocks-BetriebBei Distributed-Clocks-Betrieb arbeitet die EL2212 nach Zeitstempelauftrag wie die EL2252. Entsprechend ist das Prozessabbild gleich.
|
Eingangsdaten | |
|---|---|
|
Name |
Beschreibung / Funktion |
|
Feedback |
Die Klemme gibt in diesem Byte den aktuellen Zustand der Ausgangskanäle zurück. Dadurch kann ein Schaltauftrag kontrolliert werden. |
|
Ausgangsdaten | |
|---|---|
|
Name |
Beschreibung / Funktion |
|
Activate |
Mit diesem Byte wird durch den Übergang 0 --> 3 ein neuer Startzeitpunkt in der Klemme aktiviert. Die Abfolge:
Es kann an die EL2212/EL2252 immer nur ein Schaltauftrag mit den Soll-Zuständen beider Kanäle (Ausgang, Tristate) übermittelt werden. Nach Ablauf des Auftrags ist die Klemme für einen neuen Schaltauftrag bereit, es sei denn der bestehende Auftrag wird zuvor bereits überschrieben. |
|
Start time |
64 Bit Wert des nächsten gewünschten Schaltereignisses. Die Daten der DC-Zeit:
|
| Schaltzeitpunkt Der gewünschte Schaltzeitpunkt muss vom Zeitpunkt der Berechnung in der NC/PLC aus gesehen weit "genug" in der Zukunft liegen um an die Klemme inkl. Aktivierung übermittelt werden zu können. Da 2 EtherCAT-Zyklen für die Aktivierung benötigt werden wird empfohlen, diesen Abstand nicht kleiner als 3 Zykluszeiten zu wählen. |
DC Digital output with InfoData
Wie beiden Standard-Daten können auch im DC-Betrieb zusätzliche Informationsdaten eingeblendet werden. Siehe oben.
Multi-Timestamping
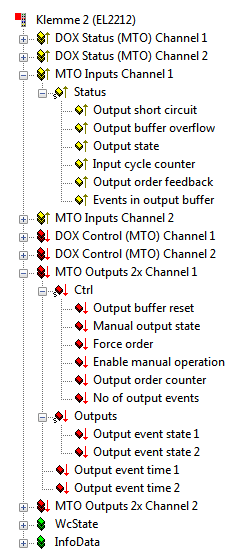 Abb.154: Prozessdaten bei Multi-Timestamping-Betrieb (2-fach Oversampling)
Abb.154: Prozessdaten bei Multi-Timestamping-Betrieb (2-fach Oversampling)Das Multi-Timestamping unterstützt zwei Kanäle mit jeweils 1-fach, 2-fach, 5-fach bzw. 10-fach Oversampling. Der Faktor gibt an wie viele Ereignisse maximal pro EtherCAT-Zyklus in den Ausgabepuffer geladen werden können.
|
Eingangsdaten | |
|---|---|
|
Name |
Beschreibung / Funktion |
|
Output short circuit |
Ausgang hat einen Kurzschluss/Überlast. |
|
Output buffer overflow |
Es wurden mehr Events in den Puffer geschrieben als freie Elemente verfügbar sind. |
|
Output state |
Aktueller Zustand desr Ausgangs. |
|
Input cycle counter |
Aktualisierungszähler der PLC Input Daten. |
|
Output order feedback |
Feedback des Order counters. |
|
Events in output buffer |
Aktuelle Anzahl der im Puffer verbliebenen Events. |
|
Ausgangsdaten | ||
|---|---|---|
|
Name |
Beschreibung / Funktion | |
|
Ctrl |
Output buffer reset |
Alle Ereignisse im Ausgangs-Puffer löschen. |
|
Manual output state |
Den Ausgang fest auf diesen Wert setzen (aktivierbar über CoE und PDO, siehe Enable manual operation). | |
|
Force order |
Bereits abgelaufene Ereignisse werden ebenfalls ausgegeben, wenn „1“. Ist nur bei aktivierter Zeitstempelprüfung „Enable time check“ = „1“ relevant. Siehe detailliertere Erläuterung unten. | |
|
Enable manual operation |
Manuellen Betrieb über das PDO bit 'Manual output state' zulassen. | |
|
Output order counter |
Durch Inkrementieren dieses Wertes wird der Klemme mitgeteilt, dass neue Werte im PDO liegen. | |
|
No of output events |
Anzahl der im PDO abgelegten Ereignisse | |
|
Outputs |
Output event state n |
Ausgangswert zum Zeitpunkt des n-ten Timestamps |
|
Output event time n |
Timestamp des n-ten Events | |
Die EL2212 bearbeitet die Multi-Timestamp-Aufträge mit einem Takt von ca 25 µs und entscheidet in diesem Rhythmus ob eine Ausführung ansteht oder nicht. Dem entsprechend beträgt somit auch die realisierbare Zeitauflösung und damit Zeitgenauigkeit des elektrischen Schaltsignals 25 µs.
Detaillierte Erläuterung zu Enable time check/ Force order
Die Verwendung der Zeitstempelprüfung „Enable time check“ = „1“ wird im Folgenden in Verbindung mit dem PDO „Force Order“ in drei Modi dargestellt:
|
Modus |
Enable time check |
Force Order |
Auswirkung | |
|---|---|---|---|---|
|
1 |
0 |
- |
Zeitstempelprüfung inaktiv, d.h. vom momentanen DC Zeitwert ausgehend mehr als 100 µs zurückliegende Zeitstempel werden als zukünftige Zeitstempel interpretiert, was u.U. eine Verzögerung der Zustandsübertragungen von bis zu ca. 4,29 s hervorrufen kann. | |
|
2 |
1 |
0 |
keine Ausgabe veralteter Ereignisse |
Zeitstempelprüfung aktiv, das Zeitintervall des zu übertragenden Zeitstempels wird auf ±231 aufgeteilt, d.h. ca. 2,15 s zeitlich zurückliegend und ca. 2,15 zeitlich vorausliegend. Letzteres stellt eine herabgesetzte Begrenzung des zul. Zeitbereichs von ca. 4,29 s auf ca. 2,15 s dar. |
|
3 |
1 |
1 |
sofortige Ausgabe des veralteten Ereignisses | |
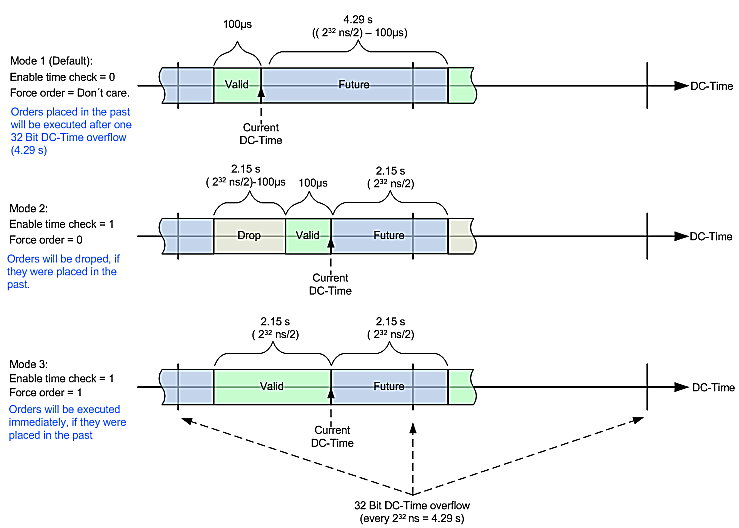 Abb.155: Behandlung des Zeitstempels der Ausgabezustände bei aktivierter Zeitstempelprüfung
Abb.155: Behandlung des Zeitstempels der Ausgabezustände bei aktivierter ZeitstempelprüfungHinweis | |
Bedingungen für Zeitstempel beim Multi-Timestamping
|
Prozessdatenübersicht
Die manuelle Prozessdatenzuordnung ist erforderlich bei TwinCAT bis Version 2.10.
Sync Manager (SM)
Der Umfang der angebotenen Prozessdaten kann über den Reiter „Prozessdaten“ verändert werden (siehe folgende Abbildungen).
Dem Output-SyncManager können die PDOs aus dem Bereich 0x160n (0x1600, 01x1601, 0x1602) zugeordnet werden, siehe Abbildung „Karteireiter Prozessdaten Sync Manager mit Outputs“.
Dem Input-SyncManager die PDOs aus dem Bereich 0x1A0n (0x1A00 bis 0x1A049), siehe Abbildung „Karteireiter Prozessdaten Sync Manager mit Inputs“.
Nicht alle Kombinationen sind technisch möglich
 Abb.156: Karteireiter Prozessdaten SM2 (Outputs), EL2212 (default)
Abb.156: Karteireiter Prozessdaten SM2 (Outputs), EL2212 (default)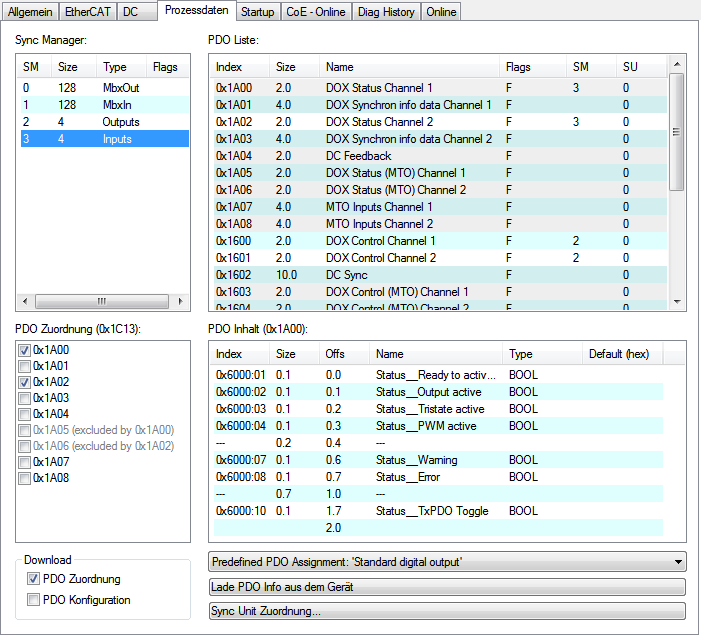 Abb.157: Karteireiter Prozessdaten SM3 (Inputs), EL2212 (default)
Abb.157: Karteireiter Prozessdaten SM3 (Inputs), EL2212 (default)Manuelle PDO-Zuordnung
Zur Konfiguration der Prozessdaten markieren Sie im oberen linken Feld „Sync Manager“ den gewünschten Sync Manager „Inputs“ oder „Outputs“ (beide sind editierbar). Im Feld darunter „PDO Zuordnung“ können dann die diesem Sync Manager zugeordneten Prozessdaten an- oder abgeschaltet werden. Ein Neustart des EtherCAT-Systems oder Neu-Laden der Konfiguration im Config-Modus (F4) bewirkt einen Neustart der EtherCAT-Kommunikation und die Prozessdaten werden von der Klemme übertragen.
|
SM2 (Outputs), PDO-Zuordnung 0x1C12 | ||||
|---|---|---|---|---|
|
Index |
Index ausgeschlossener PDOs |
Größe (Byte.Bit) |
Name |
PDO Inhalt |
|
0x1600 (default) |
0x1603 |
2.0 |
DOX Control |
Index 0x7000:02 - Output Index 0x7000:03 - Tristate Index 0x7000:04 - PWM Index 0x7000:08 - Reset |
|
0x1601 (default) |
0x1604 |
2.0 |
DOX Control |
Index 0x7010:02 - Output Index 0x7010:03 - Tristate Index 0x7010:04 - PWM Index 0x7010:08 - Reset |
|
0x1602 |
0x1607 |
10.0 |
DC Sync ausschließlich in Verbindung mit DC-Betriebsart möglich! |
Index 0xF700:01 - Activate Index 0xF700:03 - Start time |
|
0x1603 |
0x1600 |
2.0 |
DOX Control (MTO) |
Index 0x7000:04 - PWM Index 0x7000:08 - Reset |
|
0x1604 |
0x1601 |
2.0 |
DOX Control (MTO) |
Index 0x7010:04 - PWM Index 0x7010:08 - Reset |
|
0x1605 |
- |
3.0 |
DOX PWM |
Index 0x7000:11 - Duty cycle Index 0x7000:13 - PWM Tperiod |
|
0x1606 |
- |
3.0 |
DOX PWM |
Index 0x7010:11 - Duty cycle Index 0x7010:13 - PWM Tperiod |
|
0x1607 |
0x1602 |
48.0 |
MTO Outputs 10x |
Index 0x7021:01 - Output buffer reset Index 0x7021:02 - Manual output state Index 0x7021:03 - Force order Index 0x7021:04 - Enable manual operation Index 0x7021:09 - Output order counter Index 0x7021:11 - No of output events Index 0x7021:21 - Output event state 1 Index 0x7021:22 - Output event state 2 Index 0x7021:23 - Output event state 3 Index 0x7021:24 - Output event state 4 Index 0x7021:25 - Output event state 5 Index 0x7021:26 - Output event state 6 Index 0x7021:27 - Output event state 7 Index 0x7021:28 - Output event state 8 Index 0x7021:29 - Output event state 9 Index 0x7021:2A - Output event state 10 Index 0x7021:41 - Output event time 1 Index 0x7021:42 - Output event time 2 Index 0x7021:43 - Output event time 3 Index 0x7021:44 - Output event time 4 Index 0x7021:45 - Output event time 5 Index 0x7021:46 - Output event time 6 Index 0x7021:47 - Output event time 7 Index 0x7021:48 - Output event time 8 Index 0x7021:49 - Output event time 9 Index 0x7021:4A - Output event time 10 |
|
0x1608 |
0x1602 |
28.0 |
MTO Outputs 5x |
siehe 0x1607 mit entsprechend weniger Ereignissen |
|
0x1609 |
0x1602 |
16.0 |
MTO Outputs 2x |
siehe 0x1607 mit entsprechend weniger Ereignissen |
|
0x160A |
0x1602 |
12.0 |
MTO Outputs 10x |
siehe 0x1607 mit entsprechend weniger Ereignissen |
|
0x160B |
0x1602 |
48.0 |
MTO Outputs 10x |
Index 0x7031:01 - Output buffer reset Index 0x7031:02 - Manual output state Index 0x7031:03 - Force order Index 0x7031:04 - Enable manual operation Index 0x7031:09 - Output order counter Index 0x7031:11 - No of output events Index 0x7031:21 - Output event state 1 Index 0x7031:22 - Output event state 2 Index 0x7031:23 - Output event state 3 Index 0x7031:24 - Output event state 4 Index 0x7031:25 - Output event state 5 Index 0x7031:26 - Output event state 6 Index 0x7031:27 - Output event state 7 Index 0x7031:28 - Output event state 8 Index 0x7031:29 - Output event state 9 Index 0x7031:2A - Output event state 10 Index 0x7031:41 - Output event time 1 Index 0x7031:42 - Output event time 2 Index 0x7031:43 - Output event time 3 Index 0x7031:44 - Output event time 4 Index 0x7031:45 - Output event time 5 Index 0x7031:46 - Output event time 6 Index 0x7031:47 - Output event time 7 Index 0x7031:48 - Output event time 8 Index 0x7031:49 - Output event time 9 Index 0x7031:4A - Output event time 10 |
|
0x160C |
0x1602 |
28.0 |
MTO Outputs 5x |
siehe 0x160B mit entsprechend weniger Ereignissen |
|
0x160D |
0x1602 |
16.0 |
MTO Outputs 2x |
siehe 0x160B mit entsprechend weniger Ereignissen |
|
0x160E |
0x1602 |
12.0 |
MTO Outputs 10x |
siehe 0x160B mit entsprechend weniger Ereignissen |
|
SM3 (Inputs), PDO-Zuordnung 0x1C13 | ||||
|---|---|---|---|---|
|
Index |
Index ausgeschlossener PDOs |
Größe (Byte.Bit) |
Name |
PDO Inhalt |
|
0x1A00 (default) |
0x1A05 |
2.0 |
DOX Status |
Index 0x6000:01 - Ready to activate Index 0x6000:02 - Output active Index 0x6000:03 - Tristate active Index 0x6000:04 - PWM active Index 0x6000:07 - Warning Index 0x6000:08 - Error Index 0x6000:10 - TxPDO Toggle |
|
0x1A01 |
- |
4.0 |
DOX Synchron info data | |
|
0x1A02 (default) |
0x1A06 |
2.0 |
DOX Status |
Index 0x6010:01 - Ready to activate Index 0x6010:02 - Output active Index 0x6010:03 - Tristate active Index 0x6010:04 - PWM active Index 0x6010:07 - Warning Index 0x6010:08 - Error Index 0x6010:10 - TxPDO Toggle |
|
0x1A03 |
- |
4.0 |
DOX Synchron info data |
Index 0x6010:11 - Info data 1 Index 0x6010:12 - Info data 2 |
|
0x1A04 |
0x1A07 |
2.0 |
DC Feedback ausschließlich in Verbindung mit DC-Betriebsart möglich! |
Index 0xF600:01 - Feedback |
|
0x1A05 |
0x1A00 |
2.0 |
DOX Status (MTO) |
Index 0x6000:01 - Ready to activate Index 0x6000:04 - PWM active Index 0x6000:07 - Warning Index 0x6000:08 - Error Index 0x6000:10 - TxPDO Toggle |
|
0x1A06 |
0x1A02 |
2.0 |
DOX Status (MTO) |
Index 0x6010:01 - Ready to activate |
|
0x1A07 |
0x1A04 |
4.0 |
MTO Inputs |
Index 0x6020:01 - Output short circuit Index 0x6020:02 - Output buffer overflow Index 0x6020:03 - Output state Index 0x6020:0F - Input cycle counter Index 0x6020:11 - Output order feedback Index 0x6020:12 - Events in output buffer |
|
0x1A08 |
0x1A04 |
4.0 |
MTO Inputs |
Index 0x6030:01 - Output short circuit Index 0x6030:02 - Output buffer overflow Index 0x6030:03 - Output state Index 0x6030:0F - Input cycle counter Index 0x6030:11 - Output order feedback Index 0x6030:12 - Events in output buffer |